愿景。TemplateMatcher
在图像中找到模板
创建
描述
tMatcher=愿景。模板米atchertMatcher.此对象通过在整个图像内部以单像素增量移动模板来执行模板匹配。
tMatcher=愿景。模板米atcher(名称,值)tmatcher = Vision.templateMatcher.('Metric','Sum of absolute differences')
特性
使用
语法
描述
输入参数
输出参数
对象的功能
要使用对象功能,请将System Object™指定为第一个输入参数。例如,要发布命名的系统对象的系统资源obj,使用此语法:
发行版(obj)
例子
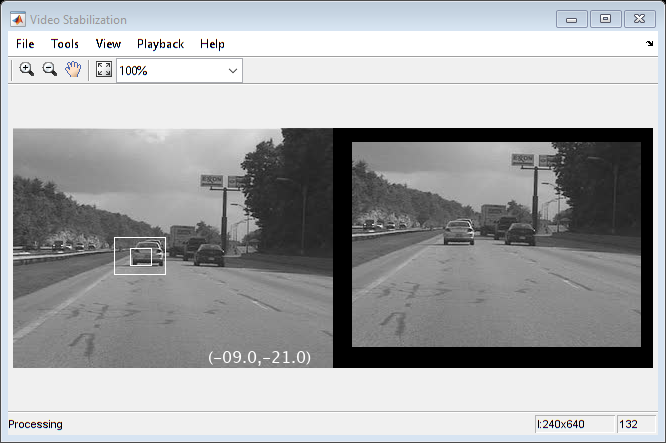
视频稳定
此示例显示如何从视频流中删除相机运动的效果。
介绍
在此示例中,我们首先定义要跟踪的目标。在这种情况下,它是汽车的背部和车牌。我们还建立一个动态搜索区域,其位置由最后一个已知的目标位置确定。然后,我们仅在该搜索区域内搜索目标,这减少了找到目标所需的计算数量。在每个后续视频帧中,我们确定目标相对于前一帧的移动量。我们使用此信息删除不需要的翻译相机运动并生成稳定的视频。
初始化
创建系统对象™以从多媒体文件读取视频。我们将输出设置为强度的视频。
%输入需要稳定的视频文件。文件名='shaky_car.avi';hvideosource = Videoreader(文件名);
创建模板匹配系统对象以计算视频帧中目标的最佳匹配的位置。我们使用此位置找到连续视频帧之间的翻译。
htm = Vision.templateMatcher(“ROIInputPort”, 真的,......“BestMatchNeighborhoodOutputPort”, 真的);
创建一个系统对象以显示原始视频和稳定的视频。
hvideoout = Vision.videoplayer(“名字”,'视频稳定');hvideoout.position(1)= round(0.4 * hvideoout.position(1));hvideoout.position(2)=圆形(1.5 *(HVIDEOOUT.POST(2)));hvideoout.position(3:4)= [650 350];
在这里,我们初始化处理循环中使用的一些变量。
pos.template_orig = [109 100];%[x y]左上角pos.template_size = [22 18];%(宽高)pos.search_border = [15 10];最大水平和垂直位移pos.template_Center =楼层((POS.Template_Size-1)/ 2);pos.template_center_pos =(pos.template_orig + pos.template_center - 1);w = hvideosource.width;%宽度(像素)h = hvideosource.height;像素中的%高度bordercols = [1:pos.search_border(1)+4 w-pos.search_border(1)+4:w];borderrows = [1:pos.search_border(2)+4 h-pos.search_border(2)+4:h];sz = [w,h];targetrowindes =......pos.template_orig(2)-1:pos.template_orig(2)+ pos.template_size(2)-2;targetcolindices =......pos.template_orig(1)-1:pos.template_orig(1)+ pos.template_size(1)-2;searchRegion = pos.template_orig - pos.search_border - 1;offset = [0 0];目标=零(18,22);第一个=真;
流处理循环
这是主要处理循环,它使用我们实例化的对象稳定输入视频。
而hasfame(hvideosource)输入= rgb2gray(im2double(ReadFride(HVIDEOSource)));%在输入视频帧中找到目标的位置如果第一个idx = int32(pos.template_center_pos);MotionVector = [0 0];第一个= false;其他的idxprev = idx;roi = [searchregion,pos.template_size + 2 * pos.search_border];IDX = HTM(输入,目标,ROI);MotionVector = double(idx-idxprev);结束[offset,searchRegion] = UpdateSearch(SZ,MotionVector,......SearchRegion、抵消、pos);%转换视频帧以抵消摄像机运动稳定= intranslate(输入,偏移,'线性');Target =稳定化(TargetRowIndices, TargetColIndices);%添加黑色边框显示稳定的(:,bordercols)= 0;稳定(Borderrows,:) = 0;targetrect = [pos.template_orig-offset,pos.template_size];searchRegionRect = [SearchRegion,POS.Template_Size + 2 * POS.Search_Border];%绘制输入上的矩形以显示目标和搜索区域输入= insertshape(输入,“矩形”,[targetrect;searchRegionRect],......'颜色',“白色”);%在输入图像上显示偏移量(位移)值txt = sprintf ('(%+ 05.1f,%+ 05.1f)', 抵消);输入=插入文本(输入(:,:,1),[191 215],TXT,'字体大小'16,......“输入TextColor”,“白色”,“BoxOpacity”, 0);%显示视频hVideoOut([输入(::1)稳定]);结束
结论
使用来自MATLAB®命令行的计算机Vision Toolbox™功能,很容易实现视频稳定等复杂系统。
附录
本例中使用了下面的helper函数。
算法
模板匹配器的典型使用涉及在更大的图像中找到一个小区域。该区域由模板图像指定,该模板图像可以与输入图像一样大,但是其通常小于输入图像。
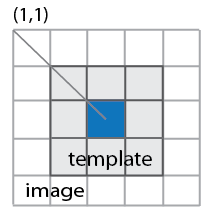
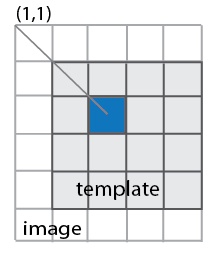
该对象输出相对于图像的左上角的最佳匹配坐标。这 [xy位置的坐标对应于模板的中心。当使用奇数像素的模板时,对象使用模板的中心。当使用偶数像素的模板时,对象使用位于中心的左上角像素作为位置。下表显示了对象如何输出位置(座垫),奇数甚至模板:
| 模板中像素的奇数 | 模板中的像素数为偶数 |
|---|---|
 |
 |
扩展能力
你也可以从以下列表中选择一个网站:
