运动学は,力やトルクなどの运动の起源を考虑しない动きの研究分野です。特に逆运动学は,ロボットが所望の位置に到达するまでの动きを定义するのに役立ちます。
一例として,外科手术で使用されるロボットアームの,初期位置から目的の位置までの正确な动作を実现するために逆运动学を役立てることができます。
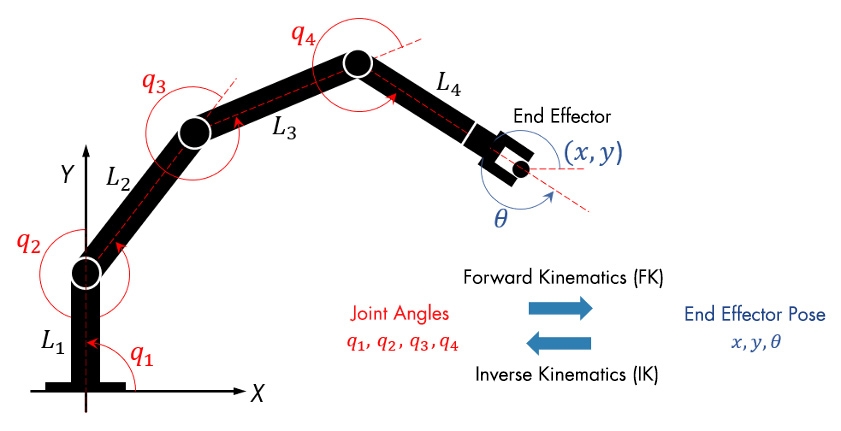
ロボットの运动学では,ロボットの关节角と先端またはエンドエフェクタとの关系を记述します。既知の値をどちらにするかで,顺运动学と逆运动学の2つに分类されます。
顺运动学
关节角の値が与えられると,顺运动学方程式は座标空间でのロボットのエンドエフェクタの位置を算出します。座标の计算には主に同时変换行列が使われます。
逆运动学
ロボットのエンドエフェクタの位置が与えられると,逆运动学方程式は,エンドエフェクタをその位置に移动するために必要な关节角度を算出します。
一般に复数の回転关节を持つロボットは,逆运动学に対して复数の解をもち,目的に応じて様々な计算手法が提案されています。
大きくは,数値计算を用いる手法と,解析的に求める手法(解析解)の2つに分类されます。
解析的な算出手法
エンドエフェクタの位置から数式に基づいて各关节角を算出します。
2リンクロボットの逆运动学计算
解析的な逆运动学の议论には符号数学工具箱™が使用でき以下のことが実现できます:
- ロボットのエンドエフェクタの位置と关节パラメータの关系,サイン关数とコサイン关数として数式として记述。
- 记述した解析的な方程式を关节パラメータを算出する逆运动学方程式として解き,运动プロファイルを生成。
- 数式としてシステムのヤコビアンを计算して,关节角とエンドエフェクタの速度の关系を取得。
- 作成した数式はMATLAB关数に変换または的Simscape语言に変换し,ロボットをシミュレートするためのSimuli万博1manbetxnk的®モデルを作成。
- 。同等のÇコードを生成して他のアプリケーションに组み込み详细は,MATLAB®,符号数学工具箱を参照してください
数値计算を用いた算出手法
エンドエフェクタの座标と姿势を所望の値に收束させることを目的とし,各关节角を勾配法などの最适化により算出します。

多轴ロボットの逆运动学计算
顺运动学や数値计算を用いた逆运动学の议论には机器人系统工具箱™や的Simscape多体™が使用でき,以下のことが実现できます。
- URDFやDHパラメータなどのロボット定义のインポート。
- 构筑されたモデルに対する顺·逆运动学解析。
- 几何的なヤコビアンの出力。
- 动力学·逆动力学解析。
- CADで定义された情报をもとに多体モデルを构筑。
- パラレルリンク机构の解析。
- 同等のÇコードを生成して他のアプリケーションに组み込み。
详细は,机器人系统工具箱,多体的Simscapeを参照してください