计算机视觉的工具箱
コンピュータービジョン,3次元ビジョン,および映像処理システムの設計およびテスト

计算机视觉工具箱™は,コンピュータービジョン,3次元ビジョン,および映像処理システムの設計とテストのためのアルゴリズム,関数,およびアプリを提供します。特徴の検出,抽出,マッチングに加えて,オブジェクトの検出と追跡を行うことができます。3次元ビジョンでは,単一,ステレオ,および魚眼レンズカメラのキャリブレーション,ステレオビジョン,3次元構造の再構築,激光雷达点群と3次元点群の処理がサポートされています。コンピュータービジョンアプリはグラウンドトゥルースラベリングとカメラキャリブレーションのワークフローを自動化します。
YOLO v2,意思R-CNN更快,およびACFなどのディープラーニングおよび機械学習アルゴリズムを使用して,カスタムのオブジェクト検出器の学習を実行できます。セマンティックセグメンテーションでは,SegNet, U-Net,およびDeepLabなどのディープラーニングアルゴリズムを使用できます。学習済みモデルを使用すると,顔や歩行者,その他のオブジェクトを検出できます。
アルゴリズムはマルチコアプロセッサおよびGPU上で実行することで高速化できます。ツールボックスのほとんどのアルゴリズムでは,既存のコードとの統合,デスクトッププロトタイピング,および組み込み画像システム展開を統合するためのC / c++コード生成をサポートしています。
詳細を見る:

オブジェクトの検出と認識
YOLO v2,意思快R-CNN、ACF Viola-Jonesなどのオブジェクト検出器の学習,評価,展開を行うフレームワーク。オブジェクト認識機能には,bag-of-visual-wordsとOCRが含まれています。学習済みモデルにより,顔や歩行者,その他のオブジェクトが検出されます。


快R-CNNを使用したオブジェクト検出。
セマンティックセグメンテーション
SegNet、FCN U-Net DeepLab v3 +などのネットワークを使用して個々のピクセルとボクセルを分類することで,画像と3次元ボリュームをセグメント化します。

グラウンドトゥルースのラベル付け
ビデオラベラーアプリとイメージラベラーアプリを使用したオブジェクト検出,セマンティックセグメンテーション,シーン分類のラベル付けを自動化します。

ビデオラベラーアプリを使用したグラウンドトゥルースのラベル付け。
点群のレジストレーション
正規分布変換(无损检测),反復最近接点(ICP),コヒーレント点ドリフト(CPD)アルゴリズムを使用して3次元点群のレジストレーションを行います。

点群のレジストレーションと繋ぎ合わせ。
セグメンテーションおよび形状の近似
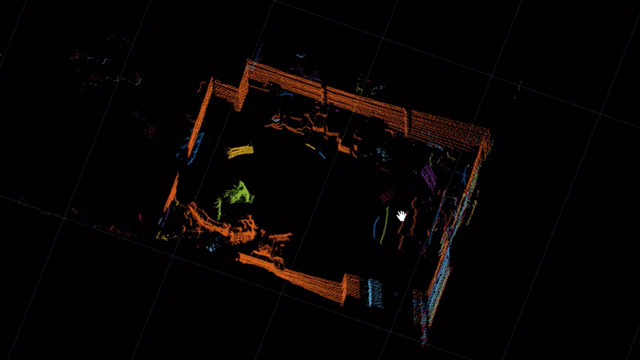
点群をクラスターにセグメント化し,幾何学的形状を点群に近似させます。自動運転アプリケーションとロボット工学アプリケーション用に激光雷达データ内の基平面をセグメント化します。

セグメント化された激光雷达点群。
単一カメラのキャリブレーション
カメラキャリブレーターアプリを使用して,チェッカーボードの検出を自動化し,ピンホールカメラと魚眼レンズカメラのキャリブレーションを行います。
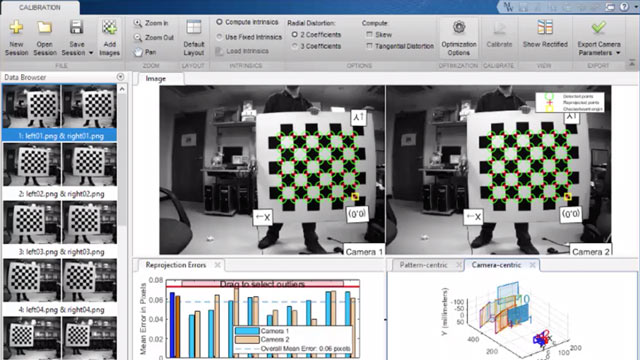
ステレオカメラキャリブレーション
深度の計算と3次元シーンの再構成を行うために,ステレオペアをキャリブレーションします。

ステレオカメラキャリブレーターアプリ。

マルチビューのモーションの構造。
ステレオビジョン
ステレオカメラのペアを使用して,深度を推定し,3次元シーンを再構築します。

相対深度を表すステレオ視差マップ。
特徴点検出,特徴量抽出およびマッチング
团,複数の画像からエッジ,およびコーナーなどの関心のある特徴を検出,抽出,およびマッチングします。

特徴点の検出,抽出,およびマッチングによる要素の多いシーンでのオブジェクト検出。
特徴に基づく画像レジストレーション
複数の画像において特徴をマッチングし,画像間の幾何学的変換を推定し,イメージシーケンスのレジスタリングを行います。

特徴に基づくレジストレーションによって作成されたパノラマ。
オブジェクト追跡
ビデオシーケンス内でオブジェクトの軌跡をフレームからフレームへ追跡します。

追跡したオブジェクトの軌跡を示す追跡痕。
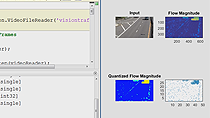
動き推定
オプティカルフロー,ブロックマッチング,およびテンプレートマッチングを使用して,ビデオフレーム間の動きを推定します。

固定カメラを使用した移動するオブジェクトの検出。
コード生成
ツールボックスの関数,クラス,システムオブジェクト,およびブロック用のC / c++, CUDAコード,および墨西哥人関数を生成します。

点群ディープラーニング
3次元点群でオブジェクトを検出して分類
大規模画像のディープラーニング
非常に大規模な画像におけるディープラーニングのオブジェクト検出器とセマンティックセグメンテーションネットワークを学習および使用
自己位置推定と環境地図作成(大满贯)
点群とカメラ大满贯の実行
バーコードリーダー
1次元および2次元バーコードを検知してデコード
SSDオブジェクト検出
单发射击multibox对象探测器(SSD)を用いた画像のオブジェクト検出
これらの機能および対応する関数の詳細については,リリースノートを参照してください。
