ビデオ·网络セミナー
反馈
从系列:使用波德图
卡洛斯·奥索里奥,MathWorks公司
了解什么是增益裕度和相位裕度,以及如何在这个MATLAB用它们来控制设计®技术讲座由卡洛斯·奥索里奥。
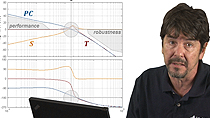
第1部分:闭环系统学习所需的频率域的形状为灵敏度和补灵敏度传递函数在由Carlos奥索里奥此MATLAB技术对话。
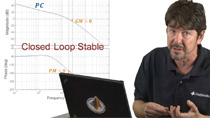
第2部分:开环整形了解如何通过塑造卡洛斯·奥索里奥这个MATLAB技术讲座开环频率响应达到期望的闭环特性。
第3部分:相位和增益裕了解什么是增益裕度和相位裕度,以及如何通过卡洛斯·奥索里奥这个MATLAB技术讲座将其用于控制设计。
第4部分:超前,滞后,PID控制器学习由卡洛斯·奥索里奥这个MATLAB技术浅谈超前,滞后的频域特性,和PID控制器。
第5部分:直流电动机控制例了解如何使用波特图在卡洛斯·奥索里奥这个MATLAB技术讲座直流电机调速。
第4部分:超前,滞后,PID控制器
使用波德图,第2部分:开环整形
使用波德图,第5部分:直流电动机控制例
使用波德图,第1部分:闭环系统
使用波德图,第4部分:超前,滞后,PID控制器
了解波德图,第1部分:为什么要使用它们?
了解波德图,第3部分:简单的系统
了解波德图,第2部分:它们是什么?
了解波德图,第4部分:复杂系统
在Simulink传递函数,第1部分:创建和万博1manbetx使用...
在Simulink传递函数,第2部分:提取传万博1manbetx送...
状态空间模型,第2部分:控制设计
状态空间模型,第1部分:创建和分析
技术计算与MATLAB,第4部分:自动化地块...
技术计算与MATLAB,第3部分:绘图工具...
卷可视化,第3部分:Scatter3与片显示...
使用和MATLAB情节删除的NaN
增益控制器计划自动调谐
PID控制器增益调度
微分方程和线性代数,3.2:相平面...
微分方程和线性代数,3.2B:第一阶段...
选择一个网站,以获得翻译的内容,其中可看到当地的活动和优惠。根据您的位置,我们建议您选择:。
您还可以选择从下面的列表中的网站:
选择最佳的网站性能的中国网站(在中国或英文)。其他MathWorks的国家网站都没有从您的位置访问进行了优化。
请联系您当地的办事处