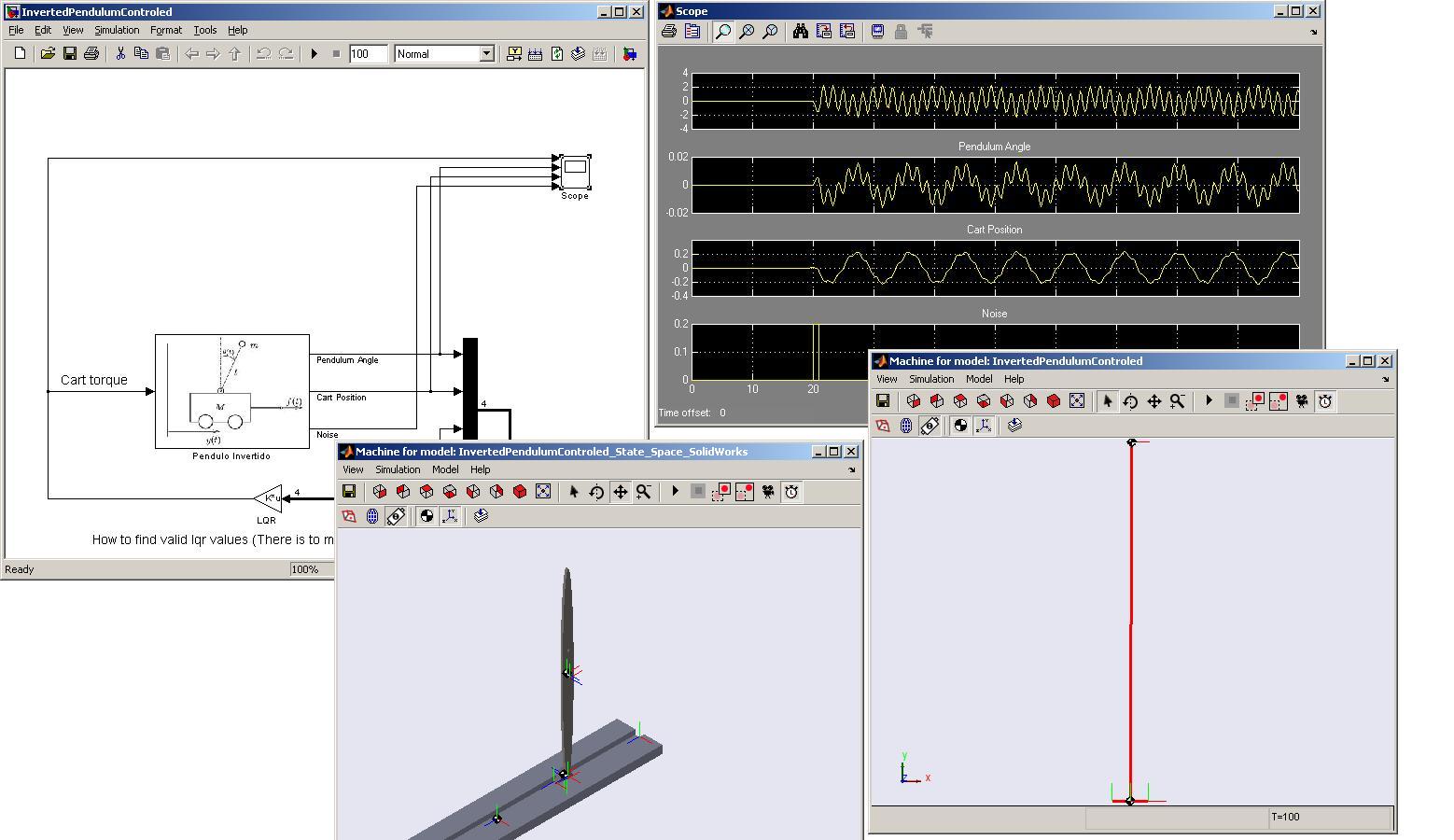
嗨Guys这是我的简单摆模型和使用SimMechanics和Control Toolbox的控制,稍后我将包含SolidWorks文件来展示如何使用SolidWorks链接。
任何发现我应该以另一种方式做事的人请免费发布任何评论并帮助我:)
该样品用Σ-R命令进行了模拟,并控制了控制。
首先,我从SolidWorks导入了钟摆
MECH_IMPORT;
>> mgrpend = mech_statevectormgr;
>> mgrpend.statenames.
ans =.
'invertedpendulummodel / pendulo_invertido /旋转:R1:位置'
'invertedpendulummodel / pendulo_invertido / prismatic:p1:位置'
'invertedpendulummodel / pendulo_invertido /旋转:R1:速度'
'InvertedPendulummodel / pendulo_invertido / prismatic:p1:速度'
>> [A,B,C,D] = LinMod('invertedPendulummodel');
>> EIG(a)
ans =.
0.
0.
2.3132
-2.3132
>> Open_Plant = SS(A,B,C,D);
>>冲动(open_plant);
>> q = diag([0 100 0 100]);
>> K = LQR(A,B,Q,R)
k =
284.3487 -10.0000 126.1560 -23.6582
>> AC = [(A-B * K)];
>> BC = [B];
>> CC = [C];
>> DC = [D];
>> SYS_CL = SS(AC,BC,CC,DC);
>> T = 0:0.01:50;
>> U = 0.2 * u(尺寸(t));
>> [y,t,x] = lsim(sys_cl,u,t);
>>绘图(T,Y)
引用
Leonardo Araujo(2021年)。LQR,PID SimMechanics的简单倒立摆(//www.tianjin-qmedu.com/matlabcentral/fileexchange/25139-simple-inverted-pendulum-with-lqr-pidulum-simherics),Matlab中央文件交换。检索到。