多体的Simscape
建模和仿真多体机械系统
的Simscape多体™(原来SimMechanics™)提供了一种用于3D机械系统,如机器人,车辆悬架,建筑设备,和飞机起落架多体模拟环境。您可以使用代表机构,关节,约束,力元和传感器块模型多体系统。的Simscape多体制定并解决了运动方程的完整机械系统。您可以导入完整的CAD组件,包括所有的群众,惯性,关节,约束和三维几何图形,到模型。自动生成的三维动画可以让你直观的系统动力学。
多体的Simscape帮助您开发控制系统和测试系统级性能。您可以使用参数化的MATLAB模型®变量和表达式,并在Simulink中的多体系统设计控制系统万博1manbetx®。您可以使用从的Simscape™系列产品的组成部分液压,电气,气动和其它物理系统整合到你的模型。s manbetx 845要部署模型等模拟环境,包括硬件在环(HIL)系统,多体的Simscape支持C代码生成。万博1manbetx
入门:
刚性和柔性三维部件
定义使用参数化的3D几何形状或CAD数据刚性和柔性部分。在MATLAB创建2D轮廓和沿着线挤压它们或它们旋转围绕轴线。指定材料特性或有限元软件导入。
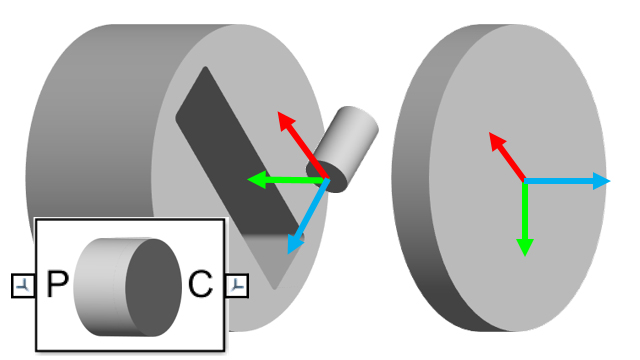
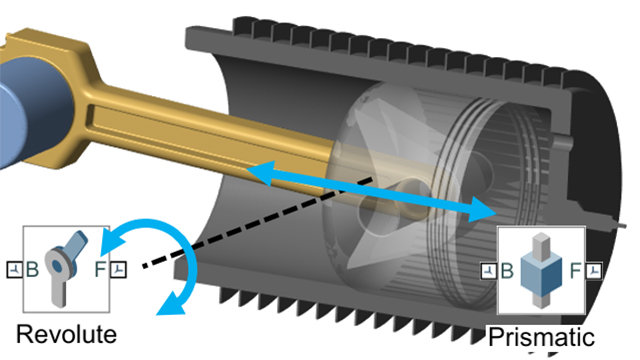
接头和约束
具有关节连接的部件,以限定自由度。包括齿条和小齿轮,伞齿轮,并在设计中通过电缆连接的滑轮。模型过山车,线性输送机,并与自定义行为的运动类似的系统。
联系部队
模型碰撞和摩擦力3D零件之间。添加自定义的空气动力学和流体动力。包括空间系统的引力。

机器人的脚与地面之间的接触力包括碰撞和摩擦力。
包括动系统
直接连接电子,液压,气动和其他系统的3D机械模型。评估驱动器技术为您的应用程序,并确定需要满足性能要求的尺寸和功耗。
设计控制算法
使用先进的线性化和自动控制调节技术来实现复杂的控制策略。迅速找到控制器增益是实现鲁棒性和响应时间目标。测试软件实现来评估系统性能。

用于副翼跟踪命令角度控制系统。
把设计团队一起
使软件程序员和硬件设计师与整个系统的可执行规范在设计过程的早期合作。使用模拟探索整个设计空间。

控制逻辑协调一个机器人手臂和两个传送带运输和重新定位的包裹。
快速浏览设计空间
自动地改变设计参数,例如长度,半径,质量和电压。并行快速运行测试,以确定设计空间的可行部分,并把重点开发工作。

优化算法调整连杆的长度直至尖端如下期望的轨迹。
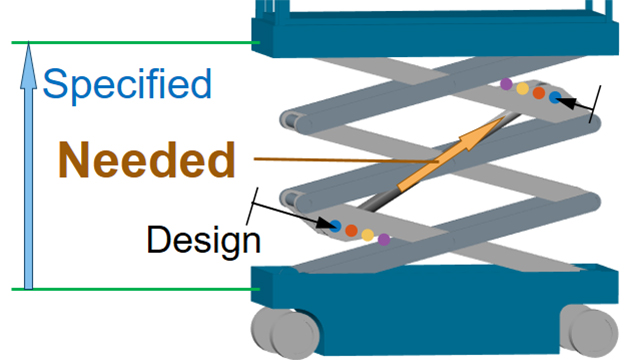
细化需求
使用抽象的模型与基本参数测试设计在开发过程的早期。计算未知数创建详细的规范。使用动态模拟,以更少的迭代完成机械设计。

之前在CAD进行详细设计的抽象设计被调谐。
增加模型重用
开发的暴露关键参数,模型用户模型库。重用通用执行器型号在许多具体产品通过改变参数的简单设计。增加企业效益与一组核心的仿真模型跨越多产品线。

一个通用的液压致动器参数化以三个特定的致动器模型。
与关节大会导入
整个CAD组件,包括与质量,惯性,并且颜色的所有份数,与伴侣和接头连接一起,是自动转换成的Simscape模型。更新现有的CAD部分可以合并到的Simscape模型..

重用CAD零件和组件中的Simscape选项。
读取原始CAD数据
由CATIA直接引用文件定义零件®Creo™,发明家®,NX™,Solid Edge的®, 扎实的作品®和Parasolid的®。部件也可以通过参照文件格式的3D建模,如步骤中指定®,STL,SAT或JT。

参考CAD文件直接用于在的Simscape模型中使用单独的部件。
编辑在3D
定义和调整上使用3D接口部分帧。图形选择顶点,边,面或卷,以定义可用于感测,关节连接,并施加力的位置和帧的取向。

添加连接点使用的Simscape多体3D界面的部分。
建立稳定的设计
指定故障标准组件,包括时间,负载,或基于温度的条件。模型劣化成分的行为,如磨损的齿轮齿或增加的轴承摩擦。自动配置模型,在故障条件下有效地验证设计。

随着力两个部分场所之间的连接超过用于关节的上限。
进行预测性维护
生成的数据来训练预测性维护算法。验证算法使用下常见和罕见的场景虚拟测试。通过确保维护减少停机时间和设备成本在正确的时间间隔进行。

甲三缸往复泵模型泄漏,阻断,和用于开发检测各种故障组合多类分类器轴承故障。
尽量减少损失
计算由机械部件所消耗的功率。验证组件的安全工作范围内运行。模拟特定事件和组测试场景,然后后期处理的结果MATLAB。

蜗轮与齿的摩擦和轴承的功率损耗。
动画模拟结果
使用模拟结果的模型和动画的自动生成的三维可视化分析系统。同时从多个角度查看动画和导出视频文件。

3D探索机制
探索您的3D界面,并导航到示意图机制来验证模型的结构和检查结果绘制。定义静态或移动视点到从自定义参考帧查看仿真结果。

探索机制的行为,装配定义,和仿真结果。
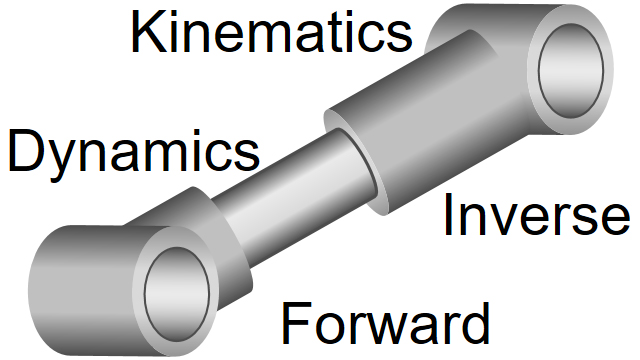
计算需要的负载
执行不同类型的分析,包括正向动力学,逆动力学,正运动学和逆运动学。计算所需的力或扭矩产生所需的移动,即使驱动和运动自由度不匹配。
测试没有硬件原型
将您的Simscape多体模型转换为C代码,以便使用dSPACE上的半实物测试来测试嵌入式控制算法®,的Speedgoat,OPAL-RT,和其他实时系统。通过配置使用的生产系统的数字化双测试执行虚拟调试。
加快优化与并行仿真
将您的Simscape多体模型,C代码,加速模拟。通过在一台机器上部署模拟,以多个内核并行运行试验中,在计算集群,或云多台机器。

使用并行计算优化机器人路径以降低功耗。
协作与其他球队
调整和模拟模型,包括先进的组件和从整个的Simscape产品系列的功能,而不需要购买一个许可证为每个的Simscape附加产品。分享保护模式与外部团队,以避免暴露IP。

的Simscape多体模型,可以与其他人谁没有购买的Simscape多体共享。
用MATLAB自动完成任何任务
使用MATLAB实现任何任务的自动化,包括模型装配、参数化、测试、数据采集和后处理。为常见任务创建应用程序,以提高整个工程组织的效率。

使用MATLAB命令构造中的Simscape多体摆模型。
优化系统设计
使用Si万博1manbetxmulink中的控制算法,硬件设计和信号处理集成在一个单一的环境。应用优化算法来寻找您的系统的最佳整体设计。

降阶灵活的固体块
模型变形在不同的几何体
联系部队
CAD几何形状和挤出和使用之间模型接触的过零点,以增加模拟速度
联合停用
释放接头的锁定轴耦合机构的自由运动
在接块运动极限
限制联游到指定的边界
KinematicsSolver增强
执行基于速度的运动学分析
惯性传感器模块
测量一组刚性连接体元件或整个机构的惯性特性
看到发行说明对任何这些特征和对应的功能的详细说明。
