激光雷达是什么?
3 things you need to know
Lidar sensors (acronym for “light detection and ranging”) are range-measuring sensors like radar and sonar. The sensors emit laser pulses that reflect off objects, allowing them to perceive the structure of their surroundings. The sensors record the reflected light energy to determine the distances to objects to create a 2D or 3D representation of the surroundings. Lidars are becoming one of the primary sensors for developing perception systems across multiple industries. They enable 3D perception workflows such as object detection, semantic segmentation, and navigation workflows such as mapping, simultaneous localization and mapping (SLAM), and path planning.
自主系统在其传感器套件中使用多个传感器,例如相机,IMU和雷达,以进行环境感知。激光雷达可以通过提供高度准确,结构和3D周围环境的信息来克服其他传感器的一些缺点。这一优势导致将激光雷达传感器引入主流知觉市场。
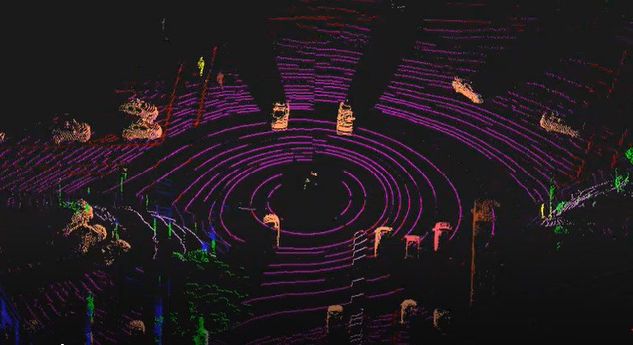
LIDAR POINT云的云层。
This market adoption of lidars is driven by three key reasons:
- Low-cost lidars
低成本激光痛的引入具有增强的特征,例如范围,大小和稳健性,已提高了该技术在相对较低的收入工业应用方面的可用性。
- Accurate 3D data
Lidars gather high-density 3D information of the surroundings as点云with a higher accuracy than other range sensors such as radars and sonars. This, in turn, improves the accuracy of the 3D reconstruction.
- Lidar processing algorithms
The recent developments in lidar processing workflows such as semantic segmentation, object detection and tracking, lidar camera data fusion, and激光大满贯使该行业能够将LIDARS添加到其开发工作流程中。您可以使用MATLAB之类的工具来开发和应用LIDAR处理算法。
激光雷达用于各种行业automated drivingto to geoscience. We can broadly classify these applications into three groups based on the platform they are mounted on.
- 空中激增
- 地面激增
- 室内激光盆
Aerial Lidars
空中激增are lidar sensors mounted onunmanned aerial vehicles(UAV) or aircrafts. Aerial lidars capture 3D point cloud data of a large terrain that can be used for lidar mapping, feature extraction, terrain classification, and other use cases.

Aerial lidar sensor.
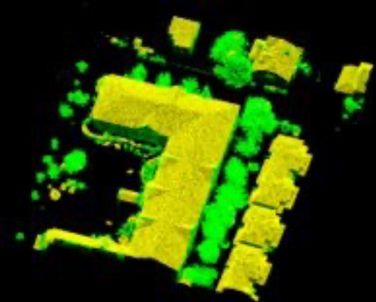
Aerial lidar data.
空中激光雷达应用的示例包括:
- Agriculture: Lidar technology is extensively used in agriculture for mapping vegetation area and identifying the exact terrain of the farm and the water catchment area.
- Urban planning: Lidars are used in creating digital surface models (DSMs) or even digital city models (DCMs) of an area, which can help design a city or build new infrastructures in an existing city.
- 地质映射:LIDARS可用于创建地球表面的3D地图,该地图可以进一步用于采矿,精密林业以及石油和天然气勘探等应用。
- Aerial navigation and path planning:现在在无人机中使用LIDARS来收集实时3D数据,以自主在周围环境中进行自主导航。
请参阅使用MATLAB的示例®for aerial lidar processing:
地面激增
磨碎的激增剂有两种类型:固定的陆地激光痛和移动激光雷达。

米obile lidar sensor.
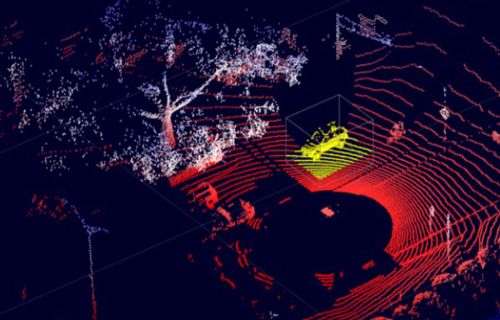
米obile lidar data.
- 固定的陆地倍增are lidars mounted on a stationary platform. They are commonly used for land surveys, road surveys, topological mapping, creating digital elevation maps (DEMs), agriculture, and other applications. These are more suited for applications where detailed and closer data capturing is needed.
- 移动激光痛are ground lidars attached on a mobile platform such as a car or a truck. The most important mobile lidar application is autonomous driving. Lidars mounted on the vehicles capture 3D point cloud data of the surroundings and they are further used in perception and navigation workflows. These workflows will be described in detail in the next section.
请参阅使用MATLAB进行地面激光雷达处理的示例:
- Track Vehicles Using Lidar: From Point Cloud to Track List
- Build a Map with Lidar Odometry and Mapping (LOAM) Using Unreal Engine Simulation
Indoor Lidars
激光雷达通过将其安装在移动机器人上,在室内机器人应用中广泛使用。除3D激光雷达外,还使用了2D激光雷达或激光扫描仪,用于LIDAR扫描和映射等室内机器人技术。他们收集周围环境的深度信息,然后根据用例进一步处理。

Indoor lidar sensor.
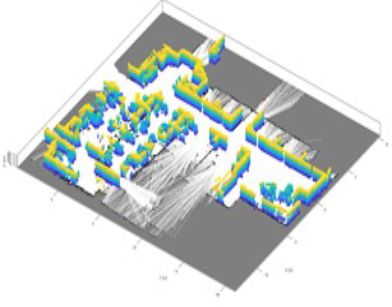
室内激光雷达数据。
Common uses of indoor lidars include:
- 激光雷达和猛击:您可以使用2D或3D激光雷达来创建2D或3D大满贯和映射。
- Obstacle detection, collision warning, and avoidance: 2D lidars are widely used to detect obstacles. This data can be further used to create collision warnings or to avoid obstacles.
请参阅使用MATLAB进行地面激光雷达处理的示例:
matlab和激光雷达的工具箱™simplify lidar processing tasks. With dedicated tools and functions, MATLAB helps you overcome common challenges in processing lidar data like 3D data types, sparsity of data, invalid points in the data, and high noises.
您可以将LIDAR数据导入MATLAB,实现LIDAR处理工作流程,并创建C/C ++和CUDA®code to deploy into production.
Some of the important capabilities MATLAB provides in processing lidar point clouds are described in the following sections.
Streaming, Reading, and Writing Lidar Data
The first step in processing any sensor data in MATLAB is to get the data into the MATLAB workspace. You can:
- Stream live datafrom Velodyne sensors using theVelodyne Lidar Hardware Support Packageand from Ouster sensors using the驱动器激光雷达硬件支持软件包万博1manbetx。
- 读取存储的点云以不同的文件格式,例如PCD,PLY,PCAP(Velodyne,Ouster和Hesai Pandar),IBEO数据容器,LAS和LAZ。
- Write point cloudsin different file formats such as PCD, PLY, LAS, and LAZ.
- Simulate lidar data, allowing you to test your algorithms and workflows before deploying to a real-world system. In MATLAB, you can synthesize 3D or 2D lidar data in simulation environments by defining sensor parameters for testing your processing algorithms.激光雷达的工具箱,无人机工具箱, andAutomated Driving Toolboxprovides lidar sensor models to simulate lidar point clouds.

Stream live lidar data from Velodyne®激光传感器。
Simulation of 3D lidar data.
Lidar Data Processing
You canpreprocess lidar data提高数据质量并从中提取基本信息。LIDAR TOOLBOX™提供功能,可用于下采样,中值过滤,对齐,转换和从点云中提取功能。
Lidar Camera Calibration
MATLABenables lidar camera calibration to estimate lidar-camera transforms for fusing camera and lidar data. You can furtherfuse color information in lidar point cloudsand使用共同定位的摄像头的2D边界框在LIDAR中估算3D边界框。

Lidar Camera Calibrator app.
对激增的深度学习
With MATLAB, you can apply deep learning algorithms for object detection and semantic segmentation on lidar data.
- With just a few lines of code in MATLAB, you can import pretrained semantic segmentation models, including PointSeg and SqueezeSegV2 on lidar data. You can also train, evaluate, and deploy your own deep learning models.
- MATLAB启用设计,培训和评估可靠的探测器,例如指数andComplexYolo-V4networks. You can detect and fit oriented bounding boxes around objects in lidar point clouds.
- TheLidar Labeler app在LIDAR中,工具箱简化了点云标签任务。您可以手动将点云标记用于对象检测和语义分割,应用内置或自定义算法自动化LIDAR点云标签,并评估自动化算法性能。

点云的语义分割。
Object Tracking on Point Clouds
MATLABcan unify multiple domains that feed into an end-to-endobject tracking workflow。这使您能够读取LiDAR数据,预处理,应用深度学习以检测对象,使用预定义的跟踪器跟踪这些对象,然后将其部署在目标硬件上。
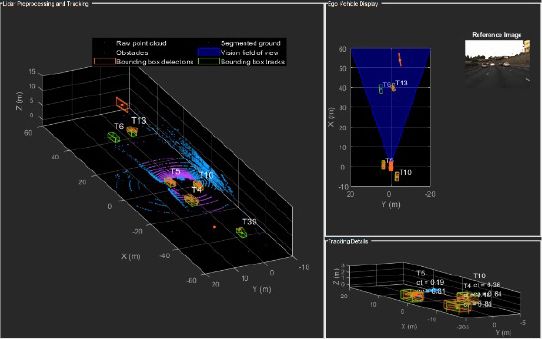
对象检测和跟踪。
Creating a map from sequential lidar point cloud data.
例子and How To
软件参考

30天免费试用
