上一节,我显示,我们可以操作的四个电机的四轴飞行器机动在3 d空间让它滚,音高、偏航和改变它的推力。我们还讨论了四个传感器,我们手头来估计系统的状态。在这个视频中,我们将使用这些知识来设计一个控制系统架构四轴飞行器悬停。这意味着,我们要找出哪些国家我们需要反馈,我们需要建立多少控制器以及控制器相互作用。我是布莱恩,欢迎来到MATLAB技术说话。
在我们开发的控制系统中,植物是minidrone本身。需要fourmotor速度作为输入,然后旋转螺旋桨,产生力和力矩影响其输出状态。输出,我们想要的是有minidrone悬停在一个固定的高度。那么问题就在于,我们如何命令这四个汽车自主发生的呢?
开始,假设而非自主,我们想命令minidrone手动。我们有一个遥控器切换,直接控制四个电机速度。左肘将控制两个方面汽车和切换控制两个后方汽车的权利。这让你在反馈路径,因为你可以看到无人驾驶飞机在哪里,然后对其立场和态度通过移动四切换非常具体的方式。
如果你想提高推力,你会加快四个汽车通过移动两个切换在这个方向。偏航要求两种对立的汽车增加的速度和其他两个减少速度,以便偏航离开时,例如,需要这种切换动作。然后滚汽车,你将增加一个左/右对,并减少。距汽车,你将增加一个正面/背面对和减少。通过这种方式,您的反馈控制器,能熟练地改变命令的无人驾驶飞机盘旋这四个马达。
虽然可能,考虑电动机转速似乎真的很难,我们要使我们的工作更容易,所以我们可以用我们上一节创建的电动机混合算法和命令推力,滚,音高,直接和偏航。当我们命令推力,例如,这一个推力命令被均匀地划分四个汽车偏航命令分配积极的两个汽车和消极的另外两个,等等。
现在我们的遥控切换与直觉,音高,偏航,而不是心灵弯曲运动的速度。这是很多运营商控制器配置时使用手动四轴飞行器的飞行。但事实证明,考虑滚,音高,偏航,推力也有益,当我们开发一个自动控制系统。我们会保持电动机混合算法,建立一个反馈控制系统,它的循环。
好吧,让我们摆脱人类操作员,思考如何能自主完成同样的事情。我们首先关注推力命令。推力总是在同一个方向相对于无人机机体,它是minidrone沿Z轴。这意味着如果无人机飞行的水平,和z轴与重力矢量,然后增加推力使无人机增加高度,速度上升,并减少推力下降高度率。这是很直接的。然而,如果我们的无人机飞行在陡峭的音调或横摇角,然后增加推力是耦合的高度和横向速度。
如果我们建立一个控制器的赛车无人机可能飞在极端横滚和俯仰角度然后我们需要考虑这种耦合。然而,对于我们的简单悬浮控制器,我假设横滚和俯仰角度总是很小。这种方式,只改变推力高度显著影响率。根据这些信息,我们可以开始我们的控制设计。
开始,让我们构建一个控制器,使用推力调整高度。如果我们能够测量无人机高度然后我们可以喂它回到比较高度参考。由此产生的错误然后送入一个高度控制器,使用这些信息来决定如何增加或减少推力。现在,我们可以把这个控制器作为某种形式的PID控制器和我们将讨论调优它在本系列以后的视频中。
这个控制器,如果无人驾驶飞机盘旋太低,高度误差将积极和推力命令将增加导致所有四个汽车加速同时,无人机将会上升。如果无人机太高,那么所有四个汽车慢下来,无人机将下降。
就是这样,对吧?我们的工作就完成了。我们已经开发了简单的高度控制器将我们minidrone盘旋。而且它是完美的!除了你知道事实并非如此,因为有障碍,像阵风一样,这将引起辊或投入系统,当这种情况发生时,推力不仅调整高度,还将创建一些水平运动和无人机将会远离你。好是保持高度悬停控制器,但需要你追逐它或者它撞向墙吗?这是很难盘旋。
不,我们显然需要一个更好的控制系统体系结构,我们应该首先努力维持水平飞行通过控制横滚和俯仰角度为0度。如果我们能保持微型无人机水平,然后再次推力只会影响高度和无人机不会跑出来。
从一节,我们知道我们能够命令推力,滚,俯仰和偏航独立,也就是说,我们可以命令一个动作而不影响他人。知道了这一点,我们可以创建三个反馈控制器,一个用于滚,音高,偏航,完全相同的推力的方法。给我们多一点的房间,我要重新绘制框图,将凝结块只是说MMA电机混合算法。
现在,输出的不仅仅是高度,我们也需要测量或估计,石油,偏航角。我将反馈所有的系统状态然后标签为每个控制器状态我用希望这对你们有帮助。我喂估计横摇角卷控制器,和偏航角进了偏航控制器,等等。
现在,我们有什么?
我们有四个独立或解耦控制器,一个用于推力,这是一个高度控制器因为我们声称小横滚和俯仰角度。然后三个控制器试图保持0度,球场上,分别和偏航。这应该保持高度,保持minidrone朝前和与地面水平。
这是一个比我们的第一个更好的悬浮控制器。但是,它仍然是不完美的。要理解为什么,让我们玩我们的假设的风通过这个系统。风可能最初引入一个小横摇角,但我们的辊控制器将删除错误并得到无人机水平飞行。然而,对于一个非常短暂的时间在推力矢量卷不是直上直下,因此无人机水平移动一点。另一个阵风并导致另一个卷或螺距误差和无人机走开了一点。所以即使无人机不会逃跑,就像我们第一次控制器,该控制器仍将允许它蜿蜒缓慢。没有在我们的控制系统体系结构,将无人机回到起始位置。
让我们改善这个控制系统做到这一点。我要再次清理我们的框图做一些额外的控制逻辑。好的,现在我们有一些房间,让我们想想横滚和俯仰在做什么而徘徊。有诱惑力的一种说法,角度应该是零,这就是我们设置当前版本的控制器。然而,他们可能需要零以盘旋。例如,如果我们想在狂风不断盘旋,然后无人机要瘦到风,在某个角度,保持地面的位置。而不是指定,我们希望水平飞行,我们需要的是一个地面位置控制器,东西会认出无人机游荡时,进行必要的修正,把它带回X和Y的参考点。
但仅仅因为我们不想选择特定的横滚和俯仰角度,这并不意味着我们不需要横滚和俯仰控制器。还记得第一个视频,四轴飞行器无法移动,右,向前或向后没有第一次滚动或推销到期望的发展方向。所以我们的控制系统需要与横滚和俯仰两位置错误。
这是一套复杂的测深的演习,但幸运的是得到的控制器很容易理解。我们可以反馈微型无人机的测量X, Y位置和比较它的引用位置误差。现在,我们会说,参考位置为0,0。这样我们的控制器将导致无人机起飞点正上方徘徊。
我们的位置控制器的位置误差作为输入,然后输出横滚和俯仰角度。这些参考角度我们横滚和俯仰控制器正试图效仿。所以我们,作为设计师,横滚和俯仰参考角度,我们让位置控制器为我们创建它们。通过这种方式,位置控制器是外循环生成参考命令内循环横滚和俯仰控制器。这些都是级联循环。
作为一个快速的边注,测量偏航角也汇聚到位置控制器。简单,原因是,X, Y位置误差是相对于地面,或世界参考系,而横滚和俯仰相对于无人机的身体。因此,球场并不总是世界无人机在X方向移动,并不总是世界无人机在Y方向移动。这取决于如何旋转,无人机或其偏航角。如果我们需要把房间里的无人驾驶飞机到一个非常特殊的地方,那么它需要知道偏航为了确定辊,音高或一些组合的两个需要实现这一点。所以我们的世界之间的位置控制器利用偏航将X, Y从身体和X, Y框架。
好的,我们走过一个思想运动,看看所有这些控制器共同努力,保持位置和高度。假设微型无人机飞行水平在正确的高度,但有点太左了。这将导致的位置误差,提要位置控制器。比例控制器的一部分将错误乘以一个常数将要求无人机向右滚动。辊控制器将有一个错误,因为滚无人机仍然是水平和请求辊转矩。这将通过电动机混合算法和要求的汽车在左边右边无人机加快和汽车慢下来。这将无人机指挥的角度。现在无人机将开始向右移动,但由于垂直分量的推力略小滚时,无人机将肌萎缩性侧索硬化症o开始失去高度。高度控制器将这个错误和增加推力相应命令。
随着无人机的继续移动,位置误差下降,因此请求的横摇角通过比例路径也下降,使无人机水平。但如果无人驾驶飞机旅行太快,那么有水平动量的方向旅行,需要删除。这就是导数项的位置控制器是有用的。它可以感觉到无人机正在迅速逼近参考位置,并开始删除卷前,甚至导致辊相反的方向以无人机减慢和停止在我们想要的位置。
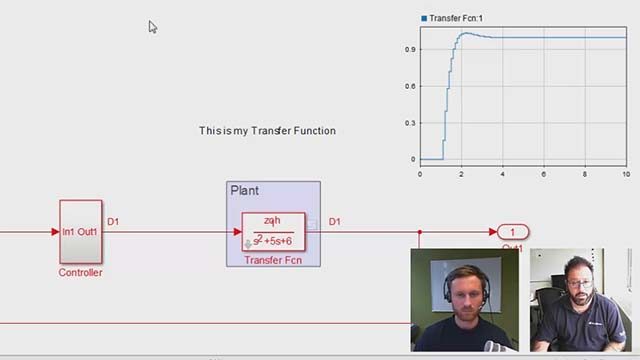
现在这是一个好的架构对于我们的悬浮控制系统,但有两个明显的障碍和调优。首先,这需要有一种估计偏航,滚,音高,高度,和XY的位置。这些都是我们反馈的信号。第二,我们需要调整六PID控制器,所有的相互作用,特别是四个直接耦合级联循环。的方式,我们要处理的第一个问题是通过结合四传感器的测量,在某些情况下使用模型和卡尔曼滤波器来估计这些反馈状态。对于第二个问题,我们需要一个好的模型的系统,我们可以使用基于模型的设计和MATLAB仿真软件来优化我们的六个PID控制器。万博1manbetx
事实上,如果我们只看这个反馈系统的控制器部分可以看到仿真软件模型具有几乎完全相同的控制器架构,我们建立了这个视频。万博1manbetx外循环XY位置控制器生成参考俯仰和横滚角内循环的俯仰/转控制器。也有偏航和高度控制器和他们每个人给电机混合算法。下一节,我们将离开这个世界的概念和图纸和移动到该仿真软件模型看看实际的软件控制系统和植物和环境动力学。万博1manbetx
如果你不想错过下一个科技视频说话,别忘了订阅这个通道。同样,如果你想看看我的通道,控制系统讲座,我覆盖更多的控制理论主题。谢谢收看,下次再见。