视频和网络研讨会
从系列:学生竞争:移动机器人技术培训
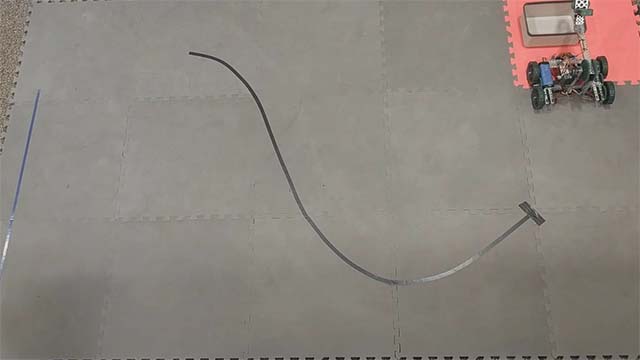
学习如何设计线后算法的移动机器人。
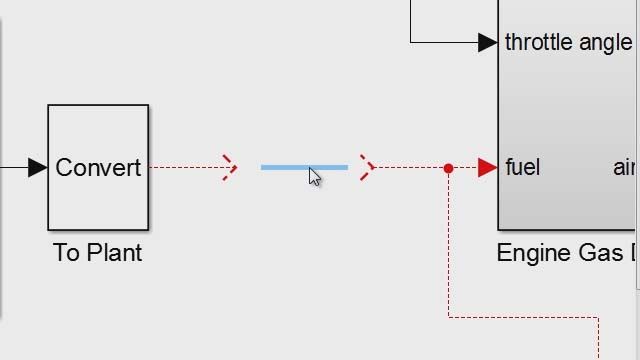
你就会明白线传感器的工作原理及其特点,喜欢输出值的范围,并使用单个传感器跟踪一条线的边缘。然后,您将学习设计开关和pid算法在仿真软件万博1manbetx®,观察两者之间的差异结果。
在这个视频中,你也将引入仿真地图发生器应用程序,允许你创建一个地图的实际图像后线轨道。您将学习如何使用生成的地图在仿真软件模拟和测试算法。万博1manbetx
烦恼EDR机器人用于演示的性能线跟踪算法在单片机和观察结果的差异之间的开关和PID算法。
额外的资源:
记录:2017年6月27日
桥接无线通讯与MATLAB设计和测试
反馈
特色产品
查看更多相关视频
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室