学习如何设计障碍检测和避免算法的移动机器人。
你会开始了解超声波或光学测距仪发现者在检测到障碍物的距离在他们面前,和一些特点特定的传感器,传感器的工作范围和分辨率,你可能会使用。你将学会设计开关和pid算法在仿真软件进行障碍检测任务,比如机器人来完全停止在指定的距离障碍。万博1manbetx
在这个视频中,您将使用仿真软件地图发生器应用程序创建一个障碍位置万博1manbetx地图从一个游戏的实际图像字段或课程。您将学习如何使用生成的地图在仿真软件模拟和测试算法。万博1manbetx
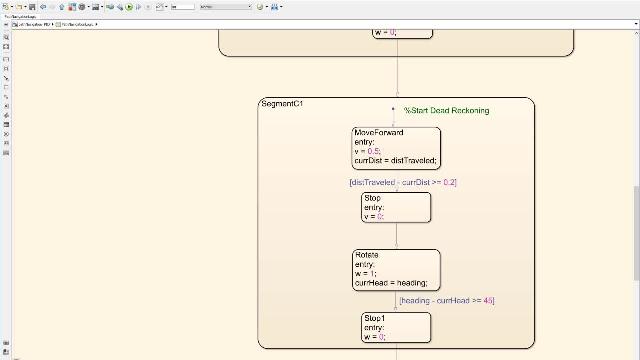
烦恼EDR机器人用于演示obstable检测算法在单片机的性能和观察结果之间的差异开关和PID算法。
额外的资源: