视频和网络研讨会
从系列中:生产设备的虚拟调试
阿尔多·卡拉塞托,马修斯
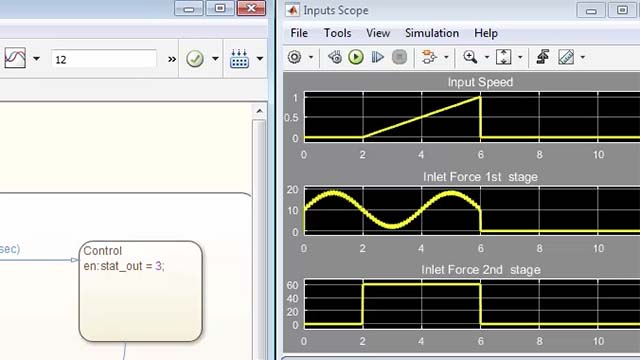
web系统动力学建模后,您可以在驱动控制系统中调整PID控制器的增益。使用PID调谐器对非线性Simulink进行线性化万博1manbetx®建模并自动计算比例、积分和微分增益。您可以使用PID调谐器通过更改控制器的速度和攻击性来微调设计。最后,您可以通过使用调整的增益更新PID控制器块,并在闭环仿真中使用设备模型对控制器进行仿真,来验证设计。
3种加速模型预测控制器的方法
深度学习实用指南:从数据到部署
基于MATLAB的桥接无线通信设计与测试
深度学习与传统机器学习:选择正确的方法
电力电子控制设计的半实物测试
基于MATLAB的预测维修
电动汽车建模与仿真-从体系结构到部署:网络研讨会系列
反馈
特色产品
查看更多相关视频
选择一个网站
选择一个网站以获取翻译后的内容(如果可用),并查看本地活动和优惠。根据您的位置,我们建议您选择:.
您还可以从以下列表中选择网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家/地区网站未针对您所在地的访问进行优化。
联系当地办事处