我很高兴地在伦敦科学博物馆(Science Museum)上撰写有关新展览的文章,其中包括MATLAB,以适用于自动驾驶汽车的深度学习。该展览名为“ Drimless:谁在控制?”(关联:
https://www.sciencemuseum.org.uk/see-and-do/driver-who-is-in-control)探索AI系统在我们的日常生活中的存在,以及我们愿意转移给他们的控制,以及它们如何塑造我们的行为和社会。它具有多个展览,可让访客体验参与创建自动驾驶汽车的AI技术,包括汽车,无人机和船只。这不仅探讨了当前的技术,还探讨了过去和未来的AI创新。
数学工作is the principal sponsor of the exhibition and is thrilled to be involved with this project to educate and inspire visitors about autonomous technology and deep learning applications.
The Exhibition
使用MATLAB开发的Mathworks的互动展览集中在自动驾驶汽车的感知系统上:使用深度学习来检测物体出现。访问者将走到车站,并能够向相机显示图片(场地提供的示例图像),并查看系统的标识以及算法对预测的自信程度。
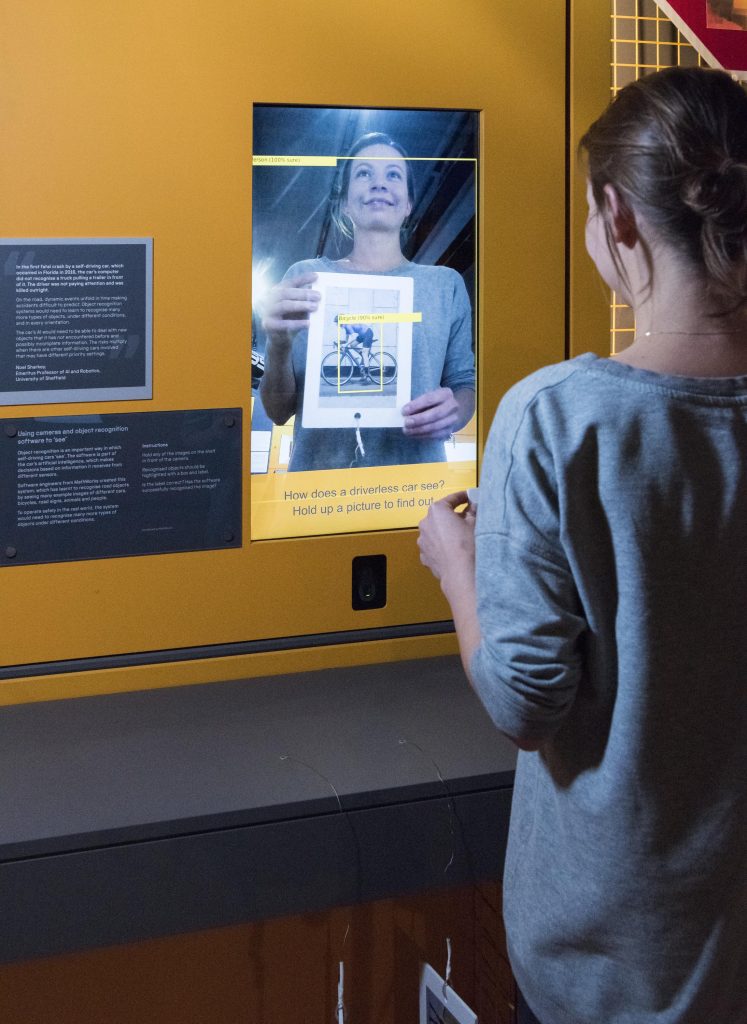
用MATLAB显示对象检测。礼貌科学博物馆小组
The Code
当然,该团队用MATLAB编写的是Yolo V2作为对象探测器,训练了20多个各种物体,包括自行车,汽车和摩托车,以及其他一些类别,包括狗,马和绵羊!博物馆的访客可以举起以识别的物体,甚至可以从移动设备中使用自己的图像。

用MATLAB闭合对象检测。礼貌科学博物馆小组
Here is a sample of code used to predict objects and visualize bounding boxes:
i =快照(相机);[盒子,分数] =检测(检测器,i);i =插入形状(i,'矩形',盒子);imshow(i);
Finally, here is the algorithm running:
 Showing Object Detection in action: courtesy of Science Museum Group
Showing Object Detection in action: courtesy of Science Museum Group
演示约束和用户注意事项
除了算法约束并验证对象检测网络的准确性外,团队还必须考虑显示此演示的条件:
- The algorithm must run 8 hours per day, including automatically booting the demo when the museum opens every morning.
- There were interesting considerations having to do with usability:
- - The average height of the visitors: Both children and adults would want to interact with the display simultaneously, so it was determined to have the monitors face vertically to accommodate a wide range of heights.
- - 您如何将预测的信心描述给不熟悉深度学习技巧的人?在科学博物馆工作人员的帮助下,确定了不是使用“信心”一词。取而代之的是“肯定”一词(如上图所示)遵循百分比。“ 99%肯定”是对非技术观众轻松理解的短语。
Q&A with MATLAB Team
1.如何将视觉系统(例如您所展示的系统)纳入无人驾驶汽车中?
| 这样的视觉系统将是无人驾驶汽车检测其周围环境的方式之一。该汽车将使用来自各种来源的信息 - 相机,传感器,GPS,在线通信 - 收集有关周围发生的事情的信息,并决定下一步要做什么。例如,汽车可能会使用GPS来确定其需要向左转,并使用视觉系统来确定何时安全。 |
2. What's next?
| 自动驾驶的研究领域有许多活跃领域。这里的想法之一是,我们利用双手,脚和眼睛开车。随着自主技术的不断发展,我们需要的这些要素就越少。事实证明,在半自治的汽车中,手,脚和眼睛也被认为是重要的,就像我们今天在某些车辆中所拥有的那样,但在完全自动的汽车中却不重要,例如我们仍然需要完全制造的汽车。(这是一篇论文for more information.) |
3.您发现该项目有用的深度学习工具箱中是否有任何特定功能?
| 我们在计算机视觉工具箱中使用了Yolo V2对象检测器网络来创建视觉系统。Yolo检测器在对象检测时非常快,因为它将视觉区域分为锚点的网格。该网络在每个锚点中寻找一个对象。如果发现一个足够良好的信心,则锚盒的大小和形状对于物体的边界框来说是一个很好的第一估计。最终的输出边界框是根据对象的中心所在的位置以及该锚框中的物体中的多少,从锚点进行完善。边界框有几种不同的尺寸和长宽比,具体取决于训练网络的对象的大小和形状。 |
4.对自动驾驶汽车深度学习的局限性有什么想法?
| 认为# 1:是一个安全的和可靠的技术,a fully autonomous driving system needs to work in a many different situations and environments, such as different terrains, different times of day, and different traffic conditions. This requires a large amount of data in all possible scenarios – a autonomous driving system can’t reliably infer what to do is a totally new situation in the same way a human would be able to. We need to help the system by training it with data from lots and lots of real-world situations, so that it can make the right decisions. To do this, the data needs to be good quality, properly labelled and balanced to prevent biases against certain situations or populations. The quality of the data directly impacts the quality of the driving system. As well, there are lots of ethical issues involved in training a system that could potentially be dangerous to other vehicles and pedestrians. When an accident happens, there may be conflicting actions that a vehicle could take, and the autonomous driving system will have to weigh up the options in accordance with some moral principles that need to be coded into the system. Deciding on those principles will need a lot of thought and debate. |
| 随着技术的进步,自主级别较高,但是每个级别的问题也不同,尤其是在驾驶员仍需要进入循环的水平上。移交,汽车对驾驶员的控制权或反之亦然,是一个关键的过渡点,需要平稳和安全,直到我们拥有完全自动的汽车为止。移交的原因可能是舒适性,汽车传感器退化,或者只是达到汽车功能的极限。人们已经想到了使用环境汽车显示或对话系统来促进这一点的方法。您可以阅读有关此主题的这些相关文章: |
5.您对自主技术的积极,消极或中立?
| 我目前没有开车,所以我期待着自动驾驶汽车在路上的观点!目前,我确实对安全有所担忧,但是我认为,通过良好的技术,良好的数据以及驾驶系统创建者之间的良好合作,我们将能够开发安全的自主驾驶系统。在某些情况下,这些可能比人类更安全,因为它们不会分心或疲倦,并且会有更快的反应时间。我认为仍然需要很多工作和讨论才能到达这一点,但是从这里看,它看起来很有希望。 |
Thanks to the team for taking the time to speak with me about this interesting project. The exhibition opened June 12
Thand will run until October 2020. If you’re in London, you should check it out!
对团队有疑问吗?在下面发表评论!
 克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上
克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上 洛伦(Matlab)的艺术
洛伦(Matlab)的艺术 史蒂夫(Steve)与MATLAB进行图像处理
史蒂夫(Steve)与MATLAB进行图像处理 Guy on Simulink
Guy on Simulink Deep Learning
Deep Learning Developer Zone
Developer Zone Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻
头条新闻 档案交换一周
档案交换一周 Hans on IoT
Hans on IoT Student Lounge
Student Lounge 初创企业,加速器和企业家
初创企业,加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
 用MATLAB闭合对象检测。礼貌科学博物馆小组Here is a sample of code used to predict objects and visualize bounding boxes:
用MATLAB闭合对象检测。礼貌科学博物馆小组Here is a sample of code used to predict objects and visualize bounding boxes:
 Showing Object Detection in action: courtesy of Science Museum Group
Showing Object Detection in action: courtesy of Science Museum Group







Comments
要发表评论,请单击here登录您的数学帐户或创建一个新帐户。