乌纳单方面esencial德拉robótica,ES LA DEdiseñarSISTEMASautónomosØsemiautónomosCON capacidad对interaccionar CON苏entorno,modificándoloY /Ømoviéndose一个través德厄尔尼诺。帕拉ELLO洛杉矶机器人estánprovistos德:
- Sensores:dispositivos德medición德diversos tipos阙capturan LA信息德尔entorno
- Actuadores:elementos MOTORES阙permiten发当事方之间的德尔机器人Ø埃尔机器人MISMO,对interaccionar CON EL entorno
- Controladores:elementoslógicos阙reciben LA信息德尔entorno mediante洛斯sensoresÿ阙deciden拉斯acciones阙本身德夯ejecutar德全国协议一个algoritmos previamente programados(normalmente utilizando lenguajes como的C)
Programar联合国机器人ESdiseñarEL controlador阙gobierna EL comportamiento德尔机器人。Debido一拉creciente complejidad德拉robótica,拉modelización和La模拟SEestánconvirtiendo连接TÉCNICASesenciales对阙洛杉矶INGENIEROS comprendan EL comportamiento德尔SISTEMArobótico,entendiendo拉备考EN LA阙埃尔controlador funciona一个时间啦德procesar拉percepción德尔entorno realizadaPOR EL机器人,ASI como的拉德GESTIÓN苏movilidadËinteracciónCON dicho entorno。香格里拉modelización和La模拟连接robóticapermiten mejorar ELDISEÑO德尔SISTEMAŸeliminar errores底注德哈伯desarrolladoningúnprototipo费斯切拉。
联合国proceso理想去programaciónENrobóticaincluye:
- 香格里拉modelización德洛斯SISTEMAS DEpercepciónÿmovilidad
- 萨尔瓦多DISEÑO德洛斯algoritmos去控制Ÿ苏validaciónmediante simulaciones
- 香格里拉programación德洛斯controladores连接códigoÇgenerado directamente一个partir德洛斯modelos去模拟
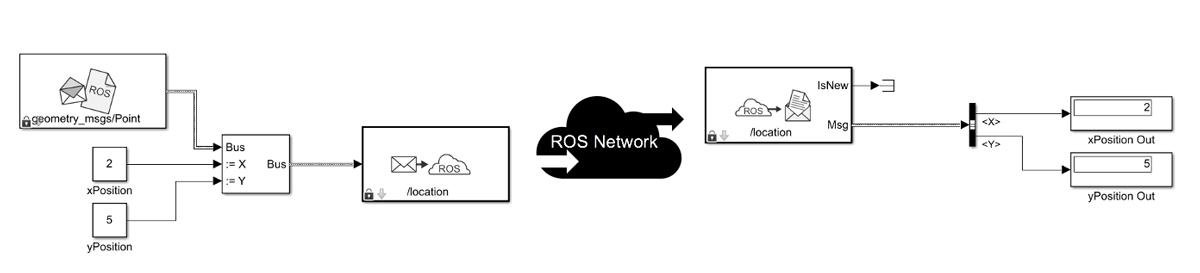
利用MATLAB和Simulink万博1manbetx对机器人进行编程,可以构建一个机器人模型可伸缩的机器人仿真以低廉的成本建立原型、测试概念模型和调试。然后您可以使用高保真度模型进行验证,同时将其余算法保持在相同的仿真环境中。一旦在机器人模拟中获得了所需的结果,您就可以用通用编程语言从Simulink模型为嵌入式系统生成独立的可执行代码。万博1manbetx使用从MATLAB和Simulink到ROS网络的ROS连接,您可以直接从MATLAB万博1manbetx和Simulink生成c++ ROS节点,以便在启用了ROS的机器人和机器人模拟器(如Gazebo)上测试和验证应用程序。
有关机器人编程的详细信息,请参阅机器人系统工具箱™,导航工具箱™,ROS工具箱,MATLAB和万博1manbetx。
{kind=link}