开始使用传感器融合和跟踪工具
设计、模拟和测试多传感器跟踪和定位系统
传感器融合和跟踪工具箱™包括算法和工具设计、模拟和测试系统,融合来自多个传感器的数据保持态势感知和本地化。参考示例提供了起点多目标跟踪监测和自治系统和传感器融合发展,包括机载、星载、地面、船载和水下系统。
您可以融合来自于现实世界的传感器数据,包括主动和被动雷达、声纳、激光雷达、EO / IR, IMU和GPS。你也可以生成合成数据从虚拟传感器来测试你的算法在不同的场景。工具箱包括多目标跟踪器和过滤器为评估架构,结合网格级,估计detection-level和对象——或者track-level融合。它还提供了指标,包括OSPA GOSPA,对地面实况场景验证性能。
为模拟加速度或快速原型,工具箱支持C和c++代码生成。万博1manbetx
教程
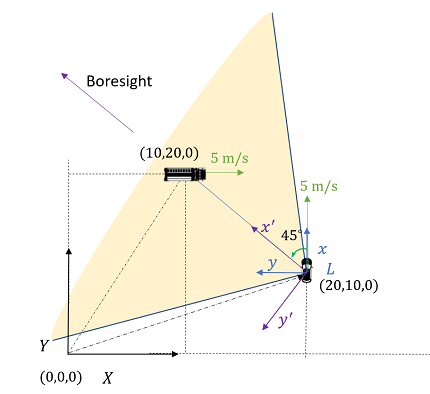
- 方向、位置和协调会议
了解工具箱约定空间表示法和坐标系统。 - 模型IMU, GPS和INS / GPS
惯性传感器和GPS的组合模型。 - 介绍估计过滤器
总复习的估计工具箱中提供的过滤器。 - 介绍多目标跟踪
介绍assignment-based多个目标跟踪器。 - 介绍跟踪指标
虽然设计多目标跟踪系统,有必要设计一个方法来评估其性能对可用的地面实况。 - 使用theaterPlot来可视化跟踪场景
这个例子展示了如何使用theaterPlot对象可视化跟踪场景的各个方面。
工具箱的约定
惯性传感器融合
估计过滤器
多目标跟踪
指标和可视化
特色的例子


视频

第1部分:传感器融合是什么?
概述传感器融合是什么以及它如何帮助在自治系统的设计。

第2部分:融合Mag、Accel和陀螺估计取向
用磁强计、加速度计和陀螺来估计物体的方向。

第3部分:融合GPS和IMU估计姿势
使用GPS和IMU估计物体的方向和位置。

第4部分:跟踪一个对象IMM滤波器
跟踪一个对象通过估计状态交互多模型滤波器。

第5部分:如何跟踪多个对象呢?
引入多目标跟踪两个常见的问题:数据关联和跟踪维护。

第6部分:Track-Level融合是什么?
介绍进行航迹融合和跟踪体系结构。