基于时变卡尔曼滤波的状态估计
此示例显示了如何在Simulink中使用时变卡尔曼滤波器估计线性系统的状态。您可以使用控制系统工具箱库中的卡尔曼滤波器块,根据嘈杂的位置测量值(如GPS传感器测量值)估计地面车辆的位置和速度。卡万博1manbetx尔曼滤波器中的设备模型具有时间特性-不同的噪声特性。
介绍
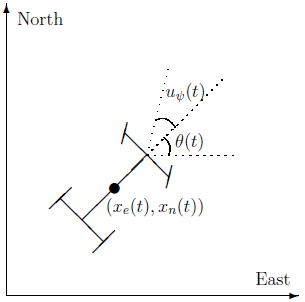
你要估计地面车辆在北和东方向的位置和速度。车辆可以在二维空间中自由移动,不受任何约束。你设计了一个多用途的导航和跟踪系统,可以用于任何物体,而不仅仅是车辆。
 和
和 是车辆从原点出发的朝东和朝北位置,
是车辆从原点出发的朝东和朝北位置, 车辆方向是否从东到西
车辆方向是否从东到西 是车辆的转向角度。
是车辆的转向角度。 是连续时间变量。
是连续时间变量。
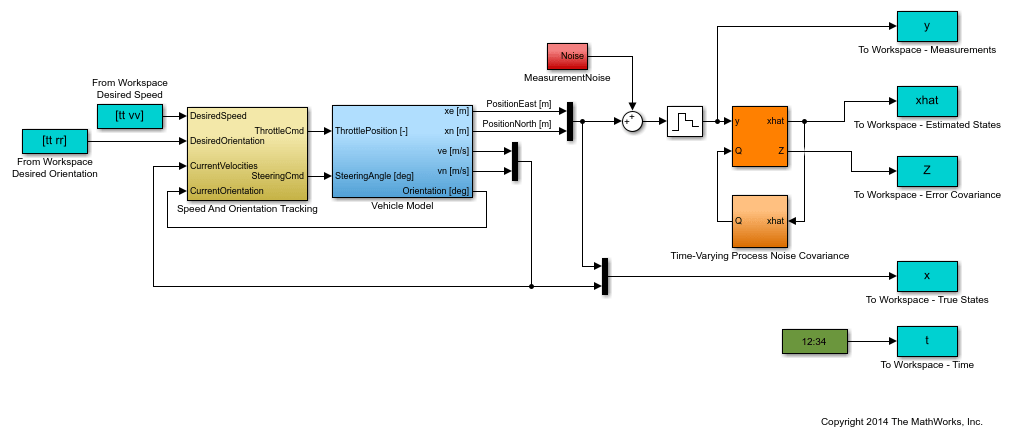
Simu万博1manbetxlink模型主要由两部分组成:车辆模型和卡尔曼滤波。下面几节将对此作进一步解释。
开放式系统(“ctrlKalmanNavigationExample”);
车型
履带车辆用简单的点质量模型表示:
![$ $ \压裂{d} {dt} \离开[& # xA; \开始{数组}{c} & # xA;x_e (t) \ \ & # xA;x_n (t) \ \ & # xA;s (t) \ \ & # xA;\θ(t) & # xA; \{数组}\]= \左右结束[& # xA; \开始{数组}{c} & # xA;s (t) \ cosθ(t)) (\ \ \ & # xA;s (t) \ sinθ(t)) (\ \ \ & # xA;(P \;{u_T(t)}{s(t)} - A \;重金属镉\; s(t)^2) / m \\
s(t) \tan(u_\psi(t)) / L
\end{array} \right]
$$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq18250448367692728369.png)
其中,车辆状态为:
![$$ \begin{array} {all}
x_e(t) \;& # 38;\ textnormal{东位置}\;[m] \ \ & # xA; x_n (t) \;& # 38;\ textnormal{北位置}\;[m] \ \ & # xA; s (t) \;& # 38;\ textnormal{速度}\;(米/秒)\ \ & # xA; \θ(t) \; & \textnormal{Orientation from east} \; [deg] \\
\end{array} $$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq10875014473735572584.png)
车辆参数为:
![$$ \begin{array} {ll}
P=100000 \;& # 38;\textnormal{峰值引擎功率}\;[W] \ \ & # xA; A = 1 \;& # 38;\ textnormal{锋面}\;(m ^ 2) \ \ & # xA;重金属镉= 0.3 \;& # 38;\ textnormal{阻力系数}\;(无单位)\ \ & # xA; m = 1250 \; & \textnormal{Vehicle mass} \; [kg] \\
L=2.5 \; & \textnormal{Wheelbase length} \; [m] \\
\end{array} $$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq05694898823621467849.png)
控制输入为:
![$$ \begin{array} {ll}
u_T(t) \;& # 38;\textnormal{油门位置在-1和1的范围内}\;(无单位)\ \ & # xA; u_ \ psi (t) \;& # 38;\ textnormal{转向角}\;[度]\ \ & # xA; \{数组}$ $](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq17001464488991671439.png)
模型的纵向动力学忽略了轮胎滚动阻力。该模型的横向动力学假设可以瞬时实现所需的转向角,且不考虑偏航惯性矩。
汽车模型是在ctrlKalmanNavigationExample /车辆模型子系统。Simulink模型包万博1manbetx含两个PI控制器,用于跟踪车辆在行驶过程中所需的方向和速度ctrlKalmanNavigationExample/速度和方向跟踪子系统。这允许您指定汽车的各种运行条件,并测试卡尔曼滤波器性能。
卡尔曼滤波器设计
卡尔曼滤波是一种基于线性模型估计未知变量的算法。这个线性模型描述了估计变量随时间的变化,以响应模型初始条件以及已知和未知的模型输入。在这个例子中,你估计了以下参数/变量:
![$$ \hat{x}[n] = \left[
c \开始{数组}{}& # xA;{x} \帽子_e [n] \ \ & # xA;{x} \帽子_n”[n] \ \ & # xA;{\ \帽子点{x}} _e [n] \ \ & # xA;{\ \帽子点{x}} _n”[n] & # xA;结束\{数组}& # xA;\右]& # xA; $ $](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq18141627810169794715.png)
在哪里
![$$ \begin{array} {all}
\hat{x}_e[n] \;& # 38;\textnormal{East position estimate} \;[m] \ \ & # xA; \帽子{x} _n”[n] \;& # 38;\textnormal{北位置估计}\;[m] \ \ & # xA; \帽子{\点{x}} _e [n] \;& # 38;\textnormal{East velocity estimate} \;(米/秒)\ \ & # xA; \帽子{\点{x}} _n”[n] \; & \textnormal{North velocity estimate} \; [m/s] \\
\end{array} $$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq07981883760355136637.png)
的 术语表示速度,而不是导数运算符。
术语表示速度,而不是导数运算符。 是离散时间指数。卡尔曼滤波器中使用的模型形式如下:
是离散时间指数。卡尔曼滤波器中使用的模型形式如下:
![$$\begin{array}{rl}
\hat{x}[n+1]&;=A\hat{x}[n]+Gw[n]\\&xA;y[n]&;=C\hat{x}[n]+v[n]
\结束{array}$$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq17297475172997356298.png)
在哪里 为状态向量,
为状态向量, 的测量,
的测量, 是过程噪音吗
是过程噪音吗 是测量噪声。卡尔曼滤波假设和是方差已知的零均值独立随机变量吗
是测量噪声。卡尔曼滤波假设和是方差已知的零均值独立随机变量吗![美元$ E [ww ^ T] =问](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq15581936003465711790.png) ,
,![$E[vv^T]=R$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq01846939691616825616.png) ,
,![美元$ E [wv ^ T] = N](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq13023816229035830465.png) .此处,A、G和C矩阵为:
.此处,A、G和C矩阵为:
![0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0和0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0#xA;\end{array}
;\right]
$$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq00574853633365408185.png)

![$$ C = \left[
\begin{array}{c c c}
1 & # 38岁;0 & # 38;0 & # 38;0 xA \ \ & #;0 & # 38;1 & # 38岁;0 & # 38;0 xA & #; \end{array}
\right]
$$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq02504443765427522229.png)
在哪里![美元$ T_s = 1 \; [s]](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq01610433175722017518.png)
A和G的第三行模型东面速度为随机游走:![$ \帽子{\点{x}} _e (n + 1) ={\点{x}} \帽子_e [n] + w_1美元[n]](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq05670624061723211216.png) .在现实中,位置是一个连续时间变量,是速度对时间的积分
.在现实中,位置是一个连续时间变量,是速度对时间的积分 .A和G的第一行表示这个运动学关系的离散近似:
.A和G的第一行表示这个运动学关系的离散近似:![美元(\帽子{x} _e (n + 1) - \帽子{x} _e [n]) / Ts =(\帽子{\点{x}} _e (n + 1) + \帽子{\点{x}} _e [n]) / 2美元](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq07043174528799563073.png) A和G的第二行和第四行表示北速度和位置之间的相同关系。
A和G的第二行和第四行表示北速度和位置之间的相同关系。
C矩阵表示只有位置测量是可用的。位置传感器,如GPS,以1Hz的采样率提供这些测量。测量噪声的方差, R矩阵,为 . 由于R被指定为标量,因此Kalman滤波器块假定矩阵R是对角的,其对角线为50,并且与y的维数兼容。如果测量噪声是高斯噪声,R=50对应于68%的位置测量值在
. 由于R被指定为标量,因此Kalman滤波器块假定矩阵R是对角的,其对角线为50,并且与y的维数兼容。如果测量噪声是高斯噪声,R=50对应于68%的位置测量值在 或东、北方向的实际位置。然而,这个假设对于卡尔曼滤波是不必要的。
或东、北方向的实际位置。然而,这个假设对于卡尔曼滤波是不必要的。
的元素捕获车辆速度在一个样本时间Ts内的变化。过程噪声的方差w,即Q矩阵,被选择为时变的。它直观地反映了![$w[n]$](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq03178806122892290353.png) 当速度较大时,则较小。例如,从0到10m/s比从10到20m/s容易。具体地说,你使用估计的北、东速度和饱和度函数来构造Q[n]:
当速度较大时,则较小。例如,从0到10m/s比从10到20m/s容易。具体地说,你使用估计的北、东速度和饱和度函数来构造Q[n]:

![$$ Q[n] = \left[
\begin{array}{c c}
\ displaystyle 1 + \压裂{250}{f{坐在}(\帽子{\点{x}} _e ^ 2)} & # 38;0 xA \ \ & #;0 & # 38;\ displaystyle 1 + \压裂{250}{f{坐在}({\点{x}} \帽子_n”^ 2)}& # xA;结束\{数组}& # xA;\右]& # xA; $ $](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq16155878329025795886.png)
Q的对角线模型,w的方差与估计速度的平方成反比。饱和函数可以防止Q变得过大或过小。通过对普通车辆0- 5,5 - 10,10 - 15,15 - 20,20 -25m/s加速度时间数据进行最小二乘法拟合得到系数250。请注意,对角线Q的选择代表了一个幼稚的假设,即在北和东方向的速度变化是不相关的。
卡尔曼滤波器块输入和设置
“卡尔曼滤波”块在控制系统工具箱Simulink中的库万博1manbetx。它也在系统辨识工具箱/估计图书馆。配置离散时间状态估计的块参数。指定以下过滤器设置参数:
时间域:离散时间。选择此选项可估计离散时间状态。
选择使用电流测量y[n]改善xhat[n]复选框。这实现了离散时间卡尔曼滤波器的“当前估计器”变量。这个选项提高了估计精度,对于慢采样时间更有用。然而,它增加了计算成本。此外,这种卡尔曼滤波器具有直接馈通,如果将卡尔曼滤波器用于不包含任何延迟的反馈环路(反馈环路本身也具有直接馈通),则会导致代数环路。代数回路会进一步影响仿真速度。
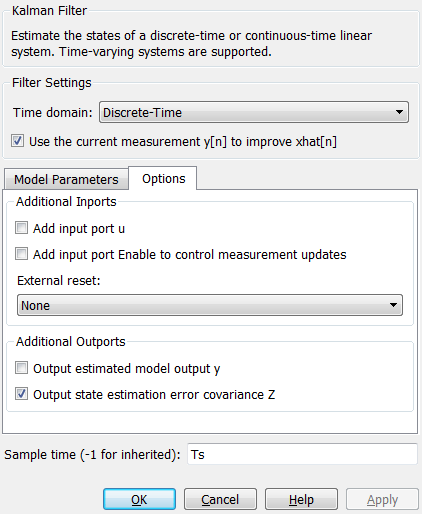
点击选项选项卡以设置块输入和输出选项:
取消添加输入端口u复选框。在工厂模型中没有已知的输入。
选择输出状态估计误差协方差Z复选框。Z矩阵提供有关过滤器在状态估计中的置信度的信息。
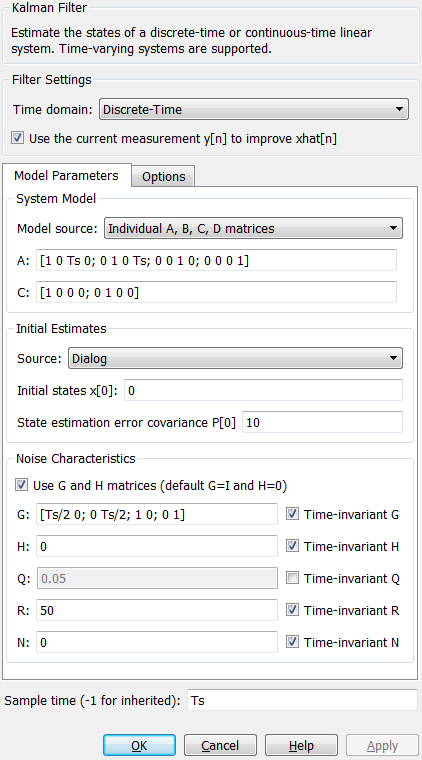
点击模型参数指定厂房型号及噪音特性:
模型来源:个体A, B, C, D矩阵。
一个A矩阵在前面的例子中已经定义。
C:C.本例前面定义了C矩阵。
初始估计源:对话框
初始状态x [0]:
0.这表示在t=0时的位置和速度估计的初始猜测值为0。
状态估计误差协方差P[0]:
10。假设您的初始猜测x[0]与其实际值之间的误差是具有标准偏差的随机变量 .
.

选择使用G和H矩阵(默认G=I和H=0)复选框以指定非默认G矩阵。
GG矩阵在前面的例子中已经定义。
H:
0.过程噪声不影响进入卡尔曼滤波块的测量值。
取消定常问复选框。Q矩阵是时变的,并通过块入口Q提供。由于这个设置,块使用了一个时变卡尔曼滤波器。您可以选择此选项以使用时不变卡尔曼滤波器。定常卡尔曼滤波器在这个问题上的表现略差,但更容易设计,计算成本更低。
R: r,这是测量噪声的协方差
![v [n]美元](//www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq14155245734251811942.png) .R矩阵在本例前面已定义。
.R矩阵在本例前面已定义。
![v [n]美元](http://www.tianjin-qmedu.com/help/examples/control/win64/KalmanTimeVaryingExample_eq14155245734251811942.png)
N:
0.假设过程噪声和测量噪声之间没有相关性。
采样时间(-1表示继承): Ts,在本例的前面定义了它。
结果
通过模拟车辆进行以下机动的场景,测试卡尔曼滤波的性能:
t = 0时,车辆的位置
 ,
, 而且是静止的。
而且是静止的。


它向东加速到25米/秒,在t=50秒时减速到5米/秒。
在t=100秒时,它转向北方并加速到20米/秒。
在t=200秒时,它又向西转弯。它加速到25米/秒。
t = 260s时减速至15m/s,匀速180度转弯。
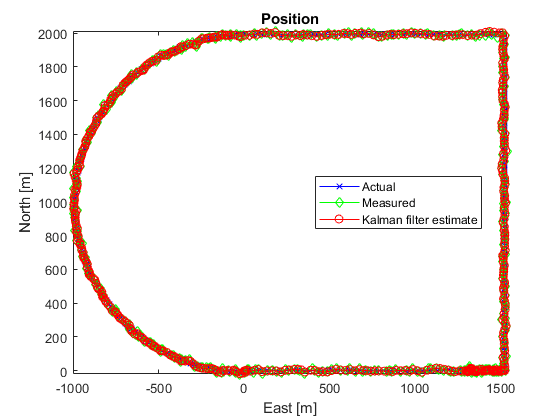
仿真Simulink模型。万博1manbetx绘制车辆位置的实际、测量和卡尔曼滤波估计。
sim卡(“ctrlKalmanNavigationExample”);图;%绘制结果,用实线连接数据点。情节(x (: 1) x (:, 2),“bx”,...y(:,1),y(:,2),“gd”,...xhat (: 1), xhat (:, 2),“罗”,...“线型”,“- - -”);标题(“位置”);包含('东[米]');ylabel (“北[m]”);传奇(“实际的”,“测量”,“卡尔曼滤波器估计”,“位置”,“最佳”);轴紧的;
测得的位置与实际位置的误差,卡尔曼滤波估计值与实际位置的误差为:
%东向位置测量误差[m]n_xe=y(:,1)-x(:,1);%北位置测量误差[m]n_xn=y(:,2)-x(:,2);%卡尔曼滤波东位置误差[m]e_xe = xhat (: 1) - x (: 1);%卡尔曼滤波北位置误差[m]e_xn = xhat (:, 2) - x (:, 2);图;%东方位置误差次要情节(2,1,1);情节(t, n_xe“g”,t,e_xe,“r”);ylabel ('位置误差-东[m]');包含(“时间[s]”); 传奇(斯普林特)('Meas:%.3f'规范(n_xe 1) /元素个数(n_xe)),...斯普林特(“卡尔曼f。:% .3f”规范(e_xe 1) /元素个数(e_xe)));轴紧的;%北位置误差次要情节(2,1,2);情节(t、y (:, 2) - x (:, 2),“g”,t,xhat(:,2)-x(:,2),“r”);ylabel ('位置误差-北[m]');包含(“时间[s]”); 传奇(斯普林特)('Meas:%.3f'规范(n_xn 1) /元素个数(n_xn)),...斯普林特('卡尔曼f:%.3f'规范(e_xn 1) /元素个数(e_xn)));轴紧的;
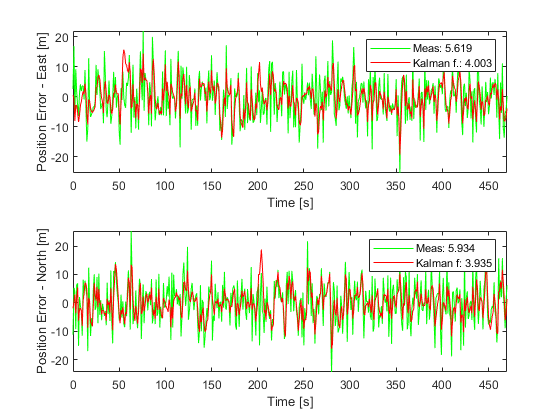
图例显示位置测量和估计误差( 和
和 ),按数据点的数量归一化。卡尔曼滤波估计的误差大约比原始测量少25%。
),按数据点的数量归一化。卡尔曼滤波估计的误差大约比原始测量少25%。
在上面的图中显示了东方向的实际速度和它的卡尔曼滤波估计。下面的图显示了估计误差。
e_ve = xhat (:, 3) - x (:, 3);% [m/s]卡尔曼滤波东速度误差e_vn=xhat(:,4)-x(:,4);%[m/s]卡尔曼滤波北速度误差图;%东向速度及其估计次要情节(2,1,1);情节(t) x (:, 3),“b”,t,xhat(:,3),“r”);ylabel (“速度-东[米/秒]”);包含(“时间[s]”);传奇(“实际的”,“卡尔曼滤波器”,“位置”,“最佳”);轴紧的;次要情节(2,1,2);%估计误差图(t、e、e),“r”);ylabel (“速度误差-东面[m/s]”);包含(“时间[s]”); 传奇(斯普林特)('卡尔曼滤波器:%.3f'规范(e_ve 1) /元素个数(e_ve)));轴紧的;
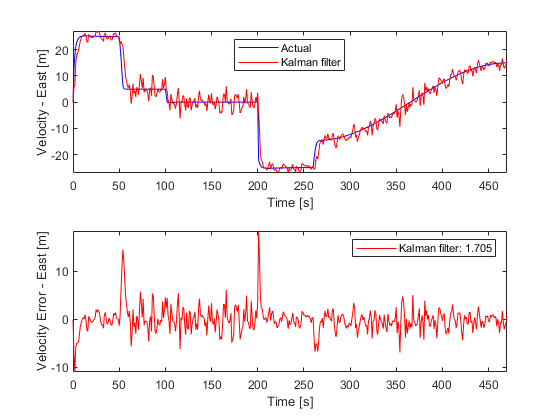
误差图上的图例显示了东速度估计误差 根据数据点的数量归一化。
根据数据点的数量归一化。
卡尔曼滤波速度估计正确地跟踪了实际速度趋势。汽车在高速行驶时噪音会降低。这符合Q矩阵的设计。大的两个峰值在t=50和t=200时。这些分别是汽车突然减速和急转弯的时间。这些时刻的速度变化比卡尔曼滤波器的预测要大得多,卡尔曼滤波器是基于其Q矩阵输入的。经过几个时间步后,滤波器估计的速度就会赶上实际速度。
总结
您使用Simulink中的卡尔曼滤波块估计了车辆的位置和速度。模型的过程噪声动态是时变的。您通过模拟各种车辆操纵和随机生成的测量噪声来验证过滤器性能。卡尔曼滤波器改进了位置万博1manbetx测量并提供了车辆的速度估计。
bdclose (“ctrlKalmanNavigationExample”);
您还可以从以下列表中选择网站:
