主要内容
多模型的时域响应
此示例显示如何使用单图对比较多模型的步骤响应步。该示例将不受控制的工厂的步进响应与两个不同的PI控制器进行了植物的闭环阶跃响应。您可以使用类似的技术与其他响应命令,例如冲动要么最初的,获取多种模型的响应曲线。
对于此示例,获取要对比的时间响应的两个模型,并在单个步骤图上绘制它们。例如,您可以比较三阶工厂G,以及闭环响应G用控制器C1.有一体的行动。
g = ZPK([],[ - 5 -5 -10],100);C1 = PID(0,4.4);CL1 =反馈(G * C1,1);步骤(g,cl1);
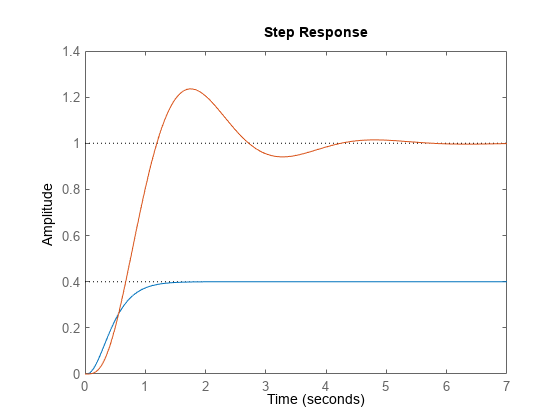
当您提供多种型号时步作为输入参数,该命令显示同一绘图上的两个模型的响应。如果您未指定绘图的时间范围,步尝试选择示出所有模型的动态的时间范围。
将闭环模型与另一个控制器的步进响应进行比较。为每个响应指定绘图颜色和样式。
C2 = PID(2.9,7.1);cl2 =反馈(g * c2,1);步骤(g,'B--',cl1,'G-',cl2,'r-')
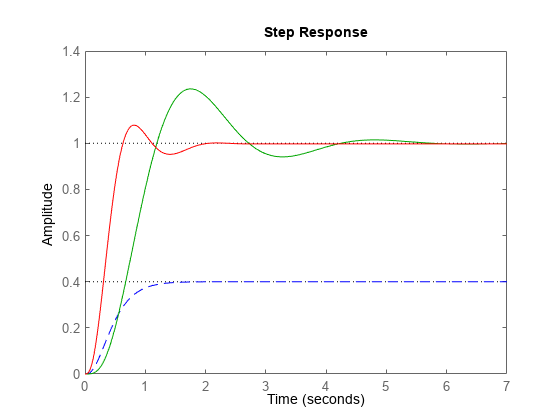
您可以为绘图中的每个响应指定自定义绘图颜色和样式。例如,'G-'指定响应的纯绿线CL2.。有关其他绘图自定义选项,请使用Stepplot.。
也可以看看
冲动|Impulssplot.|最初的|initialplot.|线性系统分析仪|步|Stepplot.
相关例子
更多关于
您还可以从以下列表中选择一个网站:
