pathPlannerRRT
配置RRT *路径规划
描述
该pathPlannerRRT对象配置基于最优快速随机树(RRT *)算法的车辆路径规划。一个RRT *路径规划通过构建随机无碰撞姿势的树探索车辆周围的环境。
一旦pathPlannerRRT对象已配置,请使用计划功能计划从一开始就构成了对目标的路径。
创建
描述
规划师= pathPlannerRRT (回报costmap)pathPlannerRRT用于规划车辆路径的对象。costmap是一个vehicleCostmap对象确定车辆周围的环境。costmap设置Costmap属性值。
规划师= pathPlannerRRT (套性能通过使用一个或多个名称值对自变量的路径规划器。例如,costmap,名称,值)pathPlanner (costmap GoalBias, 0.5)设置GoalBias属性,以0.5的概率。在引号中每个属性的名称。
属性
例子
规划通往停车位的路径
使用RRT*算法规划车辆到停车位的路径。
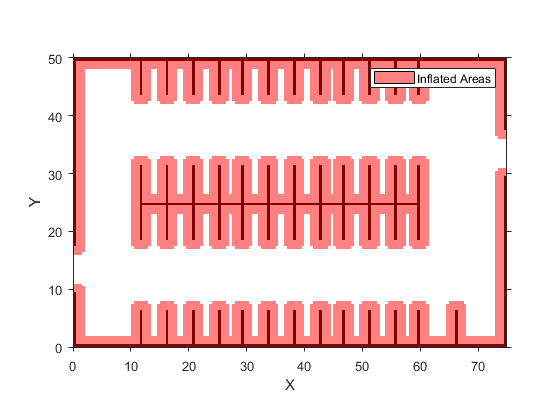
加载一个停车场的成本地图。绘制成本地图,以看到停车场和膨胀的区域,为车辆避免。
data =负载('parkingLotCostmapReducedInflation.mat');costmap = data.parkingLotCostmapReducedInflation;图(costmap)
定义起点和目标姿势的路径规划为[x, y,Θ)向量。世界单位(X,ÿ)位置是在米。世界单位为Θ方向值以度为单位。
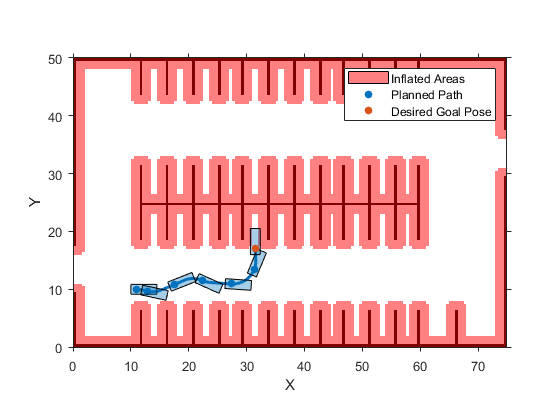
startPose = [11, 10, 0];%[米,米,度]goalPose = [31.5,17,90];
创建RRT *路径规划计划从一开始姿势到目标姿势的路径。
规划师= pathPlannerRRT (costmap);refPath =计划(计划、startPose goalPose);
绘制计划的路径。
图(规划师)
路径规划,并检查它的有效性
通过使用最佳的快速随机树(RRT *)算法,通过规划停车场的车辆路径。检查路径是否有效,然后绘制沿路径的转换姿势。
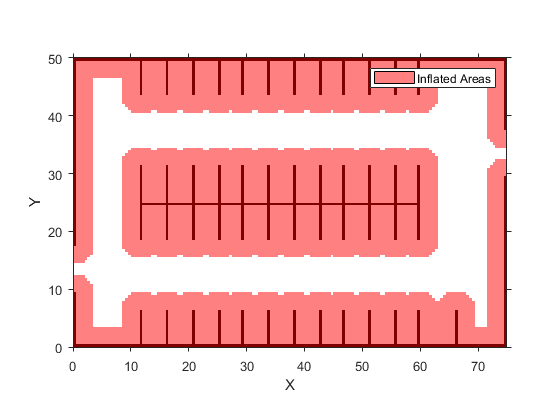
加载一个停车场的成本地图。绘制成本地图,以看到停车场和膨胀的区域,为车辆避免。
data =负载('parkingLotCostmap.mat');costmap = data.parkingLotCostmap;图(costmap)
将车辆的起始姿势和目标姿势定义为[X,ÿ,Θ)向量。世界单位(X,ÿ)位置是在米。世界单位为Θ取向角的单位为度。
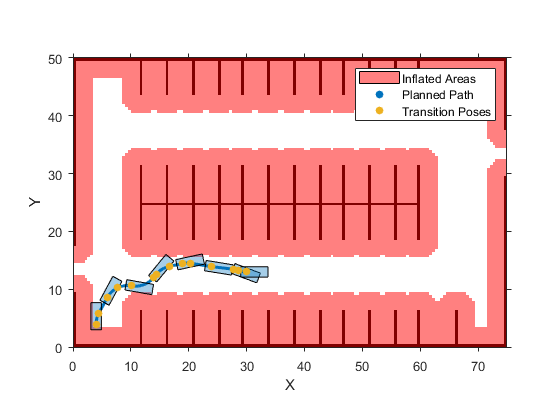
startPose = [4,4,90];%[米,米,度]goalPose = [30,13,0];
使用一个pathPlannerRRT目标规划从起始姿势到目标姿势的路径。
规划师= pathPlannerRRT (costmap);refPath =计划(计划、startPose goalPose);
检查路径是否有效。
isPathValid = checkPathValidity(refPath,costmap)
isPathValid =合乎逻辑1
沿路径插入过渡位姿。
transitionPoses =插入(refPath);
在成本图上标出计划的路径和过渡位置。
保持在情节(refPath'显示名称',“计划路径”)散射(transitionPoses (: 1) transitionPoses (:, 2), [],'填充',...'显示名称',“过渡体式”)举行从
提示
更新任何规划者的属性清除从规划路径
pathPlannerRRT。调用情节直到一个路径是使用计划只显示costmap计划。为了提高性能,
pathPlannerRRT对象使用近似最近邻搜索。只有这种搜索技术检查SQRT(N)节点,其中,ñ是节点进行搜索的次数。要使用精确最近邻搜索,设置ApproximateSearch属性假。所述的Dubins和芦苇-Shepp连接方法被认为是可行的运动学和忽略惯性效应。这些方法使路径规划器适合于低速的环境中,其中车轮力的惯性效果小。
参考
[1]卡拉曼,Sertac,和埃米利奥Frazzoli。“最佳Kinodynamic运动规划的增量采样为基础的方法。”第49次IEEE会议决定和控制中心(CDC)。2010。
[2] Shkel, Andrei M.和Vladimir Lumelsky。" Dubins分类集"机器人和自动系统。第34卷,第4期,2001年,第179-202页。
[3] Reeds, J. A.,和L. A. Shepp。“汽车前进和后退的最佳路径。”太平洋数学杂志。第145卷,第2期,1990年,第367-393页。
扩展功能
也可以看看
功能
块
对象
主题
介绍了在R2018a
你也可以从以下列表中选择一个网站:
