vehicleCostmap
Costmap代表规划车辆周围的空间
描述
的vehicleCostmap对象创建一个costmap代表车辆周围的规划搜索空间。costmap持有关于环境的信息,如障碍或区域,车辆不能遍历。检查碰撞,costmap使用通货膨胀中指定半径膨胀的障碍CollisionChecker财产。使用costmap路径规划算法,如pathPlannerRRT,找到车辆跟随的无碰撞路径。
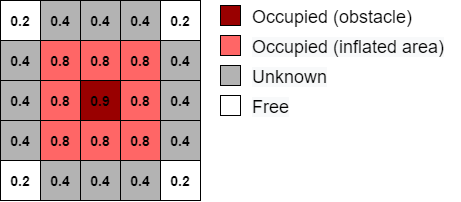
costmap存储为一个二维网格的细胞,通常被称为一个占用网格或入住率地图。costmap中的每个网格单元有一个值在[0,1]代表浏览,网格单元的成本。每个网格单元的状态免费的,被占领的,或未知的决定的FreeThreshold和OccupiedThreshold属性。
下图显示了一个costmap样品成本和网格单元的状态。
创建
语法
描述
costmap = vehicleCostmap (创建一个汽车使用成本值costmap矩阵C)C。
costmap = vehicleCostmap (创建一个车辆costmap入住率的地图occMap)occMap。使用这种语法需要导航工具箱™。
costmap = vehicleCostmap (___“MapLocation”,指定在mapLocation)mapLocationcostmap角落左下角坐标。指定MapLocation, MapLocation后的任何前输入和以任何顺序名称,值对参数。
costmap = vehicleCostmap (___,使用名称,值)名称,值对指定的参数FreeThreshold,OccupiedThreshold,CollisionChecker,CellSize属性。例如,vehicleCostmap (C ' CollisionChecker ccConfig)使用一个inflationCollisionChecker对象,ccConfig,代表车辆形状和检查碰撞。创建对象后,您可以更新除了所有这些属性CellSize。
输入参数
属性
对象的功能
checkFree |
检查车辆costmap无碰撞的姿势或点 |
checkOccupied |
检查车辆costmap占领姿势或点 |
getCosts |
细胞的车辆costmap获得成本的价值 |
setcost |
细胞的车辆costmap设置成本值 |
情节 |
情节车辆costmap |
例子
创建并填充一个车辆Costmap
创建一个10到20米costmap分为方形细胞大小0.5 - 0.5米。指定一个默认的成本价值0.5的所有细胞。
mapWidth = 10;mapLength = 20;costVal = 0.5;cellSize = 0.5;costmap = vehicleCostmap (mapWidth mapLength costVal,“CellSize”cellSize)
costmap = vehicleCostmap属性:FreeThreshold: 0.2000 OccupiedThreshold: 0.6500 CollisionChecker: [1 x1 driving.costmap。InflationCollisionChecker] CellSize: 0.5000 MapSize: 40 [20] MapExtent: [0 10 0 20]
马克costmap上的障碍。显示costmap。
occupiedVal = 0.9;xyPoint = (2、4);setcost (costmap xyPoint occupiedVal)情节(costmap)
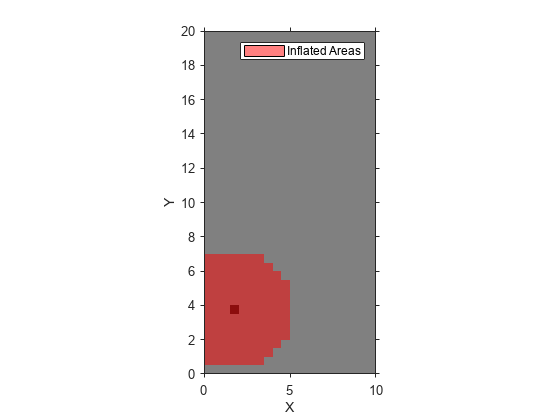
标志着costmap无障碍区。再次显示costmap。
freeVal = 0.15;(X, Y) = meshgrid (0.5: 3.5: cellSize: 5日cellSize: 1.5);setcost (costmap [X (:), Y (:)), freeVal)情节(costmap)
计划路径使用a *路径规划
计划路径最短的车辆停车位使用*网格算法。然后对车辆非完整约束,再计划使用混合A *算法的路径。
创建Occpancy映射
加载一个costmap停车场。创建一个occupancyMap(导航工具箱)使用costmap对象的属性对象。可视化入住率地图。
data =负载(“parkingLotCostmapReducedInflation.mat”);costmapObj = data.parkingLotCostmapReducedInflation;分辨率= 1 / costmapObj.CellSize;oMap = occupancyMap (costmapObj.Costmap,决议);的核心。FreeThreshold = costmapObj.FreeThreshold;的核心。OccupiedThreshold = costmapObj.OccupiedThreshold;显示(oMap)
![图包含一个坐标轴对象。坐标轴对象与标题占用网格,包含X [m], ylabel Y(米)包含一个类型的对象的形象。](http://www.tianjin-qmedu.com/help/examples/driving/win64/PlanPathUsingAStarPathPlannersExample_01.png)
计划使用*电网规划路径
创建一个使用入住率地图plannerAStarGrid(导航工具箱)对象。
gridPlanner = plannerAStarGrid (oMap);
定义启动和在世界坐标系中目标位置。这个坐标系的原点是地图左下角的角落。
startPos = (11、10);goalPos = (31.5, 18);
计划一条从起始点到目标点在世界坐标系中。
路径=计划(gridPlanner startPos goalPos,“世界”);
可视化路径和探索节点使用显示对象的功能。
显示(gridPlanner)
![图包含一个坐标轴对象。坐标轴对象标题斯达,包含X [m], ylabel Y [m]包含8图像类型的对象,线。一个或多个行显示的值只使用这些对象标记代表路径,首先,目标,GridsExplored。](http://www.tianjin-qmedu.com/help/examples/driving/win64/PlanPathUsingAStarPathPlannersExample_02.png)
对非完整约束和使用混合*规划师再计划
为验证计划创建一个状态验证器对象路径使用碰撞检查。分配入住率validator对象映射到状态。
验证器= validatorOccupancyMap;验证器。地图= oMap;
初始化一个plannerHybridAStar(导航工具箱)对象的状态验证器对象。实施的非完整约束最小转弯半径和运动通过指定原始长度MinTurningRadius和MotionPrimitiveLength规划师的属性。
hybridPlanner = plannerHybridAStar(验证器,MinTurningRadius = 4, MotionPrimitiveLength = 6);
启动和目标提出了车辆定义为(x, y,θ)向量。x和y指定位置的米,θ指定的定向角弧度。
startPose =(4 4π/ 2);%(米,米,弧度)goalPose =(45 27 -π/ 2);
计划从一开始就对道路目标构成。
refpath =计划(hybridPlanner startPose goalPose);
可视化使用的路径显示对象的功能。
显示(hybridPlanner)
![图包含一个坐标轴对象。坐标轴对象标题混合*路径规划,包含X [m], ylabel Y [m]包含8图像类型的对象,线,散射。这些对象代表前进运动原语,反向运动原语,转发路径,路径点,定位,首先,目标。](http://www.tianjin-qmedu.com/help/examples/driving/win64/PlanPathUsingAStarPathPlannersExample_03.png)
算法
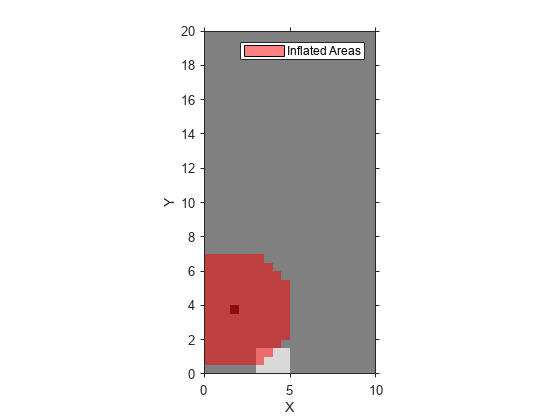
为了简化检查车辆是否构成碰撞,vehicleCostmap充气障碍的大小。collision-checking算法遵循这些步骤:
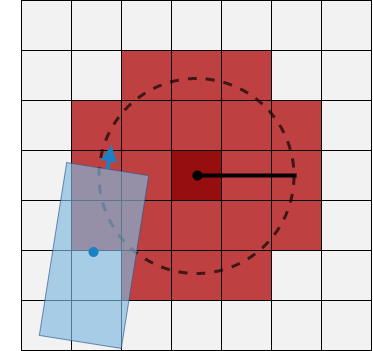
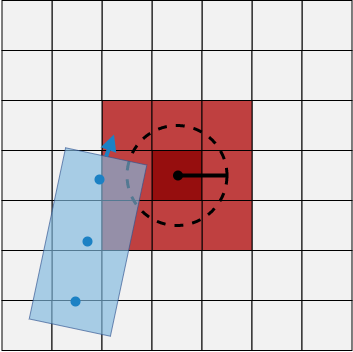
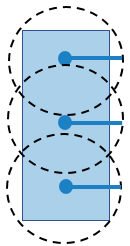
计算通货膨胀半径,在世界单位,从车辆尺寸。默认的通货膨胀半径等于最小的组重叠的圆圈的半径必须完全封闭。圆的中心点谎言沿着纵轴的车辆。增加圈的数量降低了通货膨胀半径,使更精确的碰撞检查。
通货膨胀半径,一个中心 通货膨胀半径,三个中心 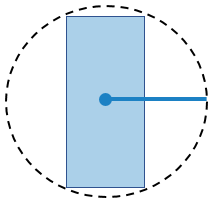
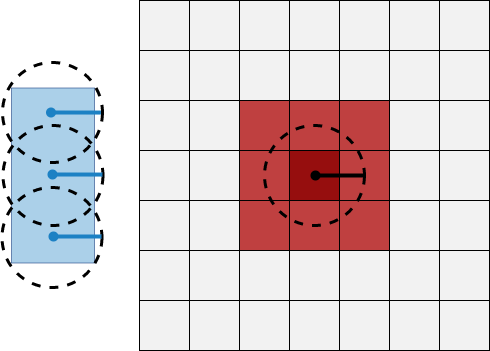
通货膨胀半径转换为一个网格单元的数量,R。围捕noninteger值R下一个最大的整数。
充气障碍使用的大小R。标签中的所有细胞膨胀区域。
图显示了深红色的细胞。细胞膨胀区域根据红色标注。扎实的黑线表示原来的通货膨胀半径。在左边的图,R是3。在右边的图,R是2。
膨胀的网状细胞,一个中心 膨胀的网格单元,三个中心 
检查车辆的中心点是否躺在充气网格细胞。
如果任何中心位于一个充气的网格单元,然后车辆构成被占领的。的
checkOccupied函数返回真正的。一个被占领的姿势并不一定意味着一个碰撞。例如,车辆可能会躺在一个充气的网格单元而不是实际占领的网格单元。如果没有中心点躺在充气网格细胞,和每个单元包含一个中心的成本价值小于
FreeThreshold,那么车辆构成免费的。的checkFree函数返回真正的。如果没有中心点躺在充气网格细胞,和成本的价值包含一个中心点大于任何细胞
FreeThreshold,那么车辆构成未知的。这两个checkFree和checkOccupied返回假。




下面的姿势被认为是在碰撞,因为至少有一个中心点的膨胀区域。
| 造成碰撞,一个中心 | 在冲突中,三个中心 |
|---|---|
|
|
|