主要内容
规划和控制
车辆成本图、最佳RRT*路径规划、横向和纵向控制器
自动驾驶工具箱™ 提供多个支持路径规划和车辆控制的功能。万博1manbetx
要规划驾驶路径,您可以使用车辆成本图和最佳快速探索随机树(RRT*)运动规划算法。您还可以检查路径的有效性,平滑路径,并沿路径生成速度曲线。
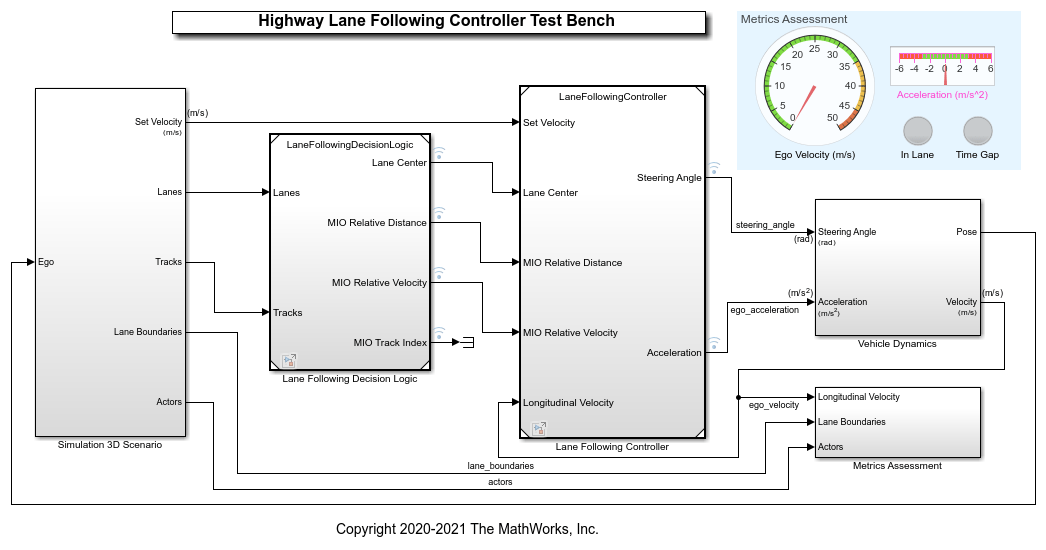
为了设计车辆控制系统,可以使用横向和纵向控制器,使自动车辆能够遵循计划的轨迹。
功能
阻碍
| 路径平滑样条 | 用三次样条插值平滑车辆路径 |
| 速度剖面仪 | 在给定运动学约束的情况下生成车辆路径的速度剖面 |
| 横向控制器Stanley | 用Stanley方法控制车辆转向角进行路径跟踪 |
| 纵向控制器Stanley | 用斯坦利法控制车辆纵向速度 |
话题
特色实例

您还可以从以下列表中选择网站:
