占领子
使用概率值创建占用映射
描述
占领子创建一个2-D占用网格映射对象。占用电网中的每个单元具有表示该细胞占用概率的值。接近1的值表示单元格包含障碍的高概率。接近0的值表示细胞未占用和障碍物的高概率。
占用地图用于导航算法,如路径规划(见plannerRRT).它们也被用于寻找无碰撞路径的映射应用程序,执行避免碰撞和计算定位(参见蒙特克洛克罗科化).您可以修改占用映射以适合您的特定应用程序。
这占领子对象支持局部坐标万博1manbetx、世界坐标和网格索引。第一个带有索引的网格位置(1,1)从网格的左上角开始。
使用占领子类创建一个环境的2-D映射,具有表示世界上不同障碍的概率值。您可以指定单元的确切概率值,或者包括来自激光扫描仪等传感器的观察。
使用二进制贝叶斯滤波器存储概率值以估计每个网格单元的占用率。使用log-odds表示,存储有值int16减少地图存储的大小,并允许实时应用程序。
创建
句法
描述
地图= itepancymap(P.)P..网格尺寸与矩阵的大小匹配,每个小区概率值从矩阵位置解释。
地图= occupancyMap (使用另一个值创建一个对象Sourcemap.)占领子目的。
地图= occupancyMap (使用另一个值创建一个对象Sourcemap.那解决)占领子对象,但是重新开始矩阵以具有指定的分辨率。
输入参数
属性
对象的功能
检查电动扫描 |
检查免费,占用或未知值的位置 |
复制 |
创建占用网格的副本 |
getOcupancy. |
获得地点的入住价值 |
grid2local. |
将网格索引转换为本地坐标 |
grid2world. |
将网格指数转换为世界坐标 |
膨胀 |
膨胀每个被占用的网格位置 |
insertray |
从激光扫描观察插入射线 |
local2grid |
将本地坐标转换为网格指数 |
local2world. |
将当地坐标转换为世界坐标 |
移动 |
在世界框架中移动地图 |
占领yatmatrix. |
将占用网格转换为双矩阵 |
雷播 |
沿着射线计算单元格指数 |
rayIntersection |
查找光线和占用地图单元的交叉点 |
setoccupancy. |
设定位置的占用价值 |
显示 |
在图中显示网格值 |
syncwith. |
同步地图与重叠地图 |
updateOccupancy |
在地点整合概率观察 |
world2grid |
将世界坐标转换为网格指数 |
world2local |
将世界坐标转换为当地坐标 |
例子
将激光扫描插入占用地图
创建空占用网格图。
地图=占领扬声器(10,10,20);
输入车辆的姿态,距离,角度和激光扫描的最大范围。
构成= (5 5 0);范围= 3 * 1 (100 1);角= linspace(-π/ 2π/ 2100);maxrange = 20;
创建一个lidarScan对象具有指定的范围和角度。
扫描= lidarScan(范围、角度);
将激光扫描数据插入占用映射。
insertRay(地图,姿势,扫描,maxrange);
显示地图以查看插入激光扫描的结果。
显示地图)
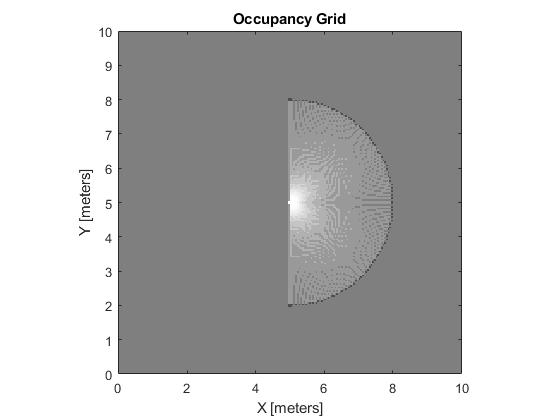
直接在车辆前检查点的入住。
getOccupancy(地图,5 [8])
ANS = 0.7000.
添加第二次读取并将更新视图到占用值。额外的读数增加了读数的置信度。自由和占用的值变得更加明显。
insertRay(地图,姿势,扫描,maxrange);显示地图)
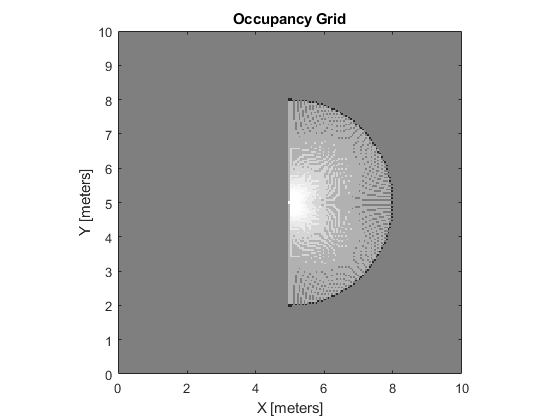
getOccupancy(地图,5 [8])
ans = 0.8448.
将PGM图像转换为映射
将包含ROS映射的便携式GrayMap(PGM)文件转换为占领子用于Matlab。
使用以下命令导入图像Imread..将图像裁剪到游戏笔区域。
image = imread(“playpen_map.pgm”);Imagecropped =图像(750:1250,750:1250);imshow(Imagecropped)
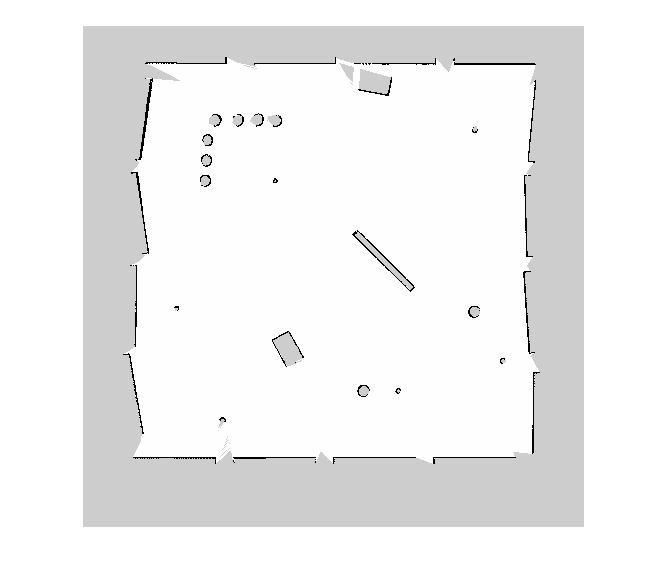
PGM值表示为0至255uint8.将裁剪后的图像转换为规格化这些值双并将每个单元分划分255.此图像显示障碍物,因为值接近0.从1中减去归一化图像以获得1表示占用空间的占用值。
imageNorm = (imageCropped) / 255年翻一番;imageOccupancy = 1 - imageNorm;
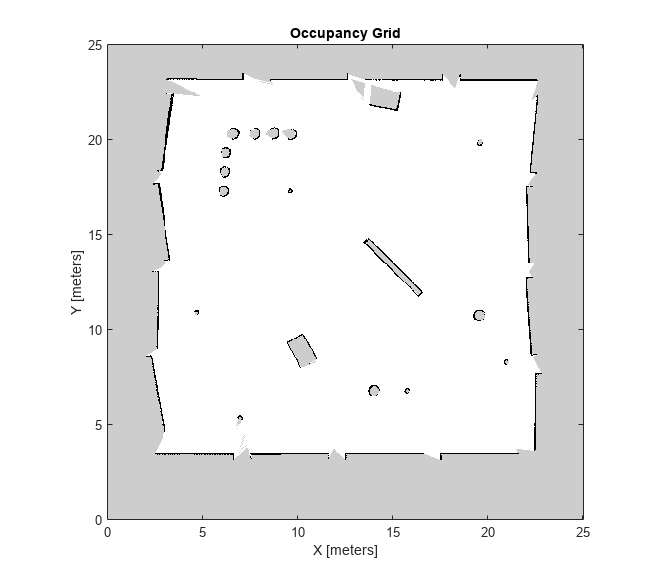
创建占领子对象使用调整后的地图图像。导入的地图分辨率为每米20个单元格。
地图= occupancyMap (imageOccupancy 20);显示地图)
限制
占用值的分辨率有限±0.001。值存储为int16使用log-odds表示。此数据类型限制了解决方案,但在MATLAB中存储大地图时会保存内存®.当调用setoccupancy.然后getOcupancy.,返回的值可能不等于您设置的值。有关更多信息,请参阅“日志赔率表示”部分占用网格.
如果内存大小有限制,可以考虑使用binaryoccupancymap.反而。二进制占用映射使用具有二进制值的更少的内存,但仍然适用于导航工具箱™算法和其他应用程序。
扩展功能
也可以看看
binaryoccupancymap.|readOccupancyGrid(ROS工具箱)|writeOccupancyGrid(ROS工具箱)|ControllerPurePURSUIT.(机器人系统工具箱)|mobileRobotPRM(机器人系统工具箱)
你也可以从以下列表中选择一个网站: