主要内容
insertRay
插入激光扫描观察的射线
句法
描述
insertray(___那用更新后的概率插入两元素向量,invModel)invModel,这对应于无障碍和占用观察。使用以前的任何语法来输入光线。
例子
将激光扫描插入占用地图
创建一个空的占用网格地图。
地图=占领扬声器(10,10,20);
输入车辆的姿态,距离,角度和激光扫描的最大范围。
姿势= [5,5,0];范围= 3 *那些(100,1);角度= Linspace(-PI / 2,PI / 2,100);maxrange = 20;
创建一个lidarScan对象具有指定的范围和角度。
扫描= LIDARSCAN(范围,角度);
将激光扫描数据插入入住地图。
insertRay(地图,姿势,扫描,maxrange);
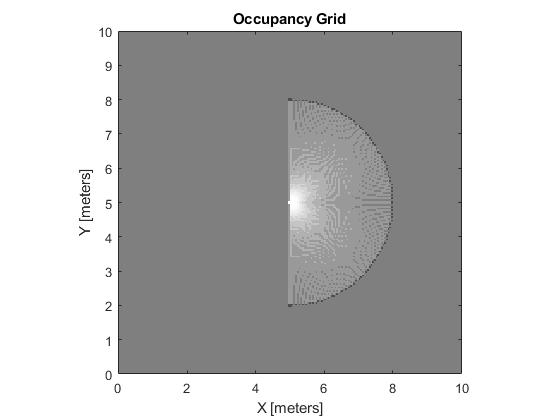
显示地图,以查看插入激光扫描的结果。
显示地图)
直接在车辆前检查点的入住。
getOccupancy(地图,5 [8])
ans = 0.7000
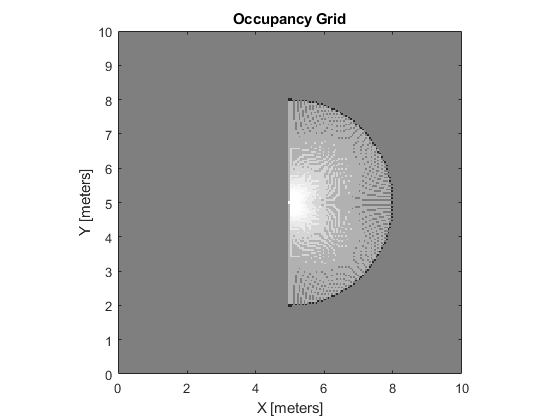
添加第二个读数并查看占用值的更新。额外的阅读增加了阅读的信心。自由和占领的价值观变得更加明显。
insertRay(地图,姿势,扫描,maxrange);显示地图)
getOccupancy(地图,5 [8])
ans = 0.8448
输入参数
更多关于

在R2019B中介绍
你也可以从以下列表中选择一个网站: