主要内容
映射
2-D和3-D的占用地图,自我中心地图,光线投射
对象
binaryOccupancyMap |
用二进制值创建占用网格 |
occupancyMap |
创建带有概率值的占用地图 |
occupancyMap3D |
创建三维入住地图 |
mapLayer |
创建映射层N维数据 |
multiLayerMap |
管理多个地图层 |
功能
buildMap |
根据激光雷达扫描建立占用地图 |
checkOccupancy |
检查位置是否有空闲、占用或未知值 |
exportOccupancyMap3D |
导入一个八叉树文件作为3D占用地图 |
入住 |
获取位置的占用值 |
getMapData |
从地图层检索数据 |
importOccupancyMap3D |
导入一个八叉树文件作为3D占用地图 |
使充气 |
膨胀每个占据的网格位置 |
插入射线 |
插入激光扫描观测的射线 |
insertPointCloud |
在地图中插入三维点或点云观测 |
地图杂波 |
生成带有随机分散障碍的地图 |
mapMaze |
生成随机的2d迷宫地图 |
移动 |
在世界框架中移动地图 |
occupancyMatrix |
将占用网格转换为双矩阵 |
raycast |
沿着射线计算单元格指数 |
rayIntersection |
查找光线和已占用贴图单元的交点 |
setOccupancy |
设置位置占用值 |
setMapData |
分配数据到地图层 |
syncWith |
同步地图与重叠地图 |
显示 |
在图中显示网格值 |
updateOccupancy |
整合地点的概率观测 |
主题
详细的入住率网格功能和地图结构。
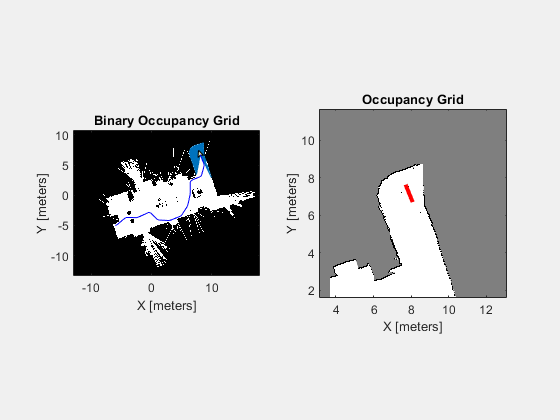
占用地图通过将连续的世界空间映射到离散的数据结构,为机器人应用程序提供了一种简单而可靠的表示环境的方法。
这个例子展示了如何从驾驶场景设计器应用程序.
的buildMap函数接受激光雷达扫描读数和相关的姿势,以建立一个占用网格lidarScan对象和相关(x yθ)建立一个occupancyMap.
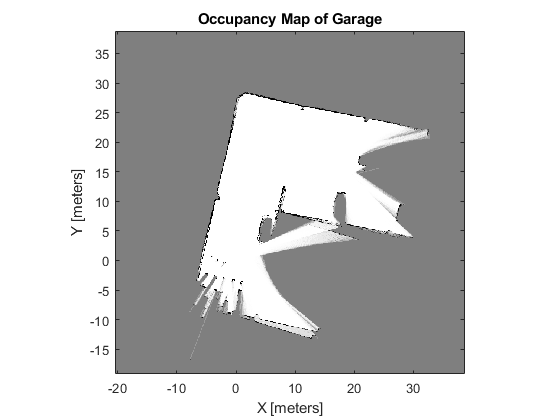
占用地图通过将连续世界空间映射到离散数据结构,为机器人应用提供了一种简单而健壮的环境表示方法。
这个例子展示了如何使用三维姿态图优化减少单目摄像机估计轨迹(位置和方向)中的漂移。
特色的例子

你也可以从以下列表中选择一个网站: