主要内容
开始使用导航的工具箱
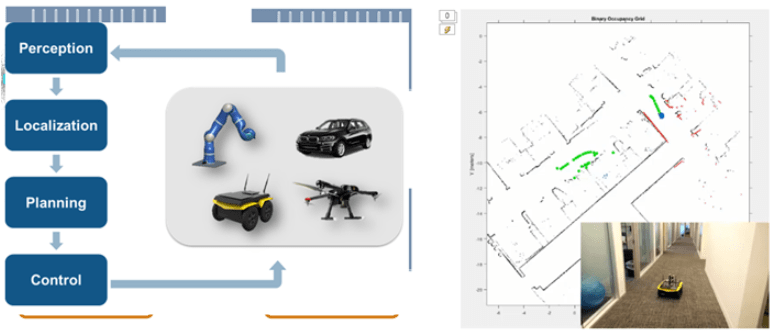
为规划和导航设计、模拟和部署算法
导航工具箱™提供了设计运动规划和导航系统的算法和分析工具。工具箱包含可定制的搜索和基于采样的路径规划者。它也包含传感器模型和算法的多传感器姿态估计。您可以使用自己的数据创建2D和3D地图表示,也可以使用工具箱中包含的同步定位和映射(SLAM)算法生成地图。为自动驾驶和机器人应用提供了参考示例。
您可以生成比较路径最优性、平滑性和性能基准的指标。SLAM map builder应用程序可以让你交互式地可视化和调试地图生成。您可以通过将算法直接部署到硬件(使用MATLAB®编码器™或万博1manbetx®编码器)。
教程
- 旋转、定向和四元数
这个例子回顾了三维旋转的概念,以及四元数是如何用来描述方向和旋转的。
- 模拟IMU测量简介
这个例子展示了如何模拟惯性测量单元(IMU)测量使用
imuSensor(传感器融合与跟踪工具箱)系统对象。 - 估计地面车辆的位置和方向
这个例子展示了如何通过融合来自惯性测量单元(IMU)和全球定位系统(GPS)接收器的数据来估计地面车辆的位置和方向。
- 用扫描匹配估计机器人的姿态
这个例子演示了如何使用正态分布变换(NDT)算法[1]匹配两个激光扫描。
- 使用RRT规划移动机器人路径
这个例子展示了如何使用快速探索随机树(RRT)算法通过已知的地图为车辆规划路径。
- 用激光雷达扫描实现同步定位和测绘(SLAM)
这个例子演示了如何使用位姿图优化在一系列收集的激光雷达扫描上实现同步定位和映射(SLAM)算法。
- 使用三维激光雷达点云进行SLAM
这个例子演示了如何使用点云处理算法和位姿图优化在收集到的三维激光雷达传感器数据上实现同步定位和绘图(SLAM)算法。
您也可以从以下列表中选择一个网站: