定位与姿态估计
使用定位和姿态估计算法来定位您的车辆在您的环境中。传感器姿态估计使用滤波器来改善和组合IMU、GPS和其他传感器读数。定位算法,如蒙特卡罗定位和扫描匹配,利用距离传感器或激光雷达读数在已知地图上估计你的姿态。姿态图跟踪你估计的姿态,并可以基于边缘约束和循环闭包进行优化。有关同步本地化和映射,请参见大满贯.
功能
主题
传感器融合
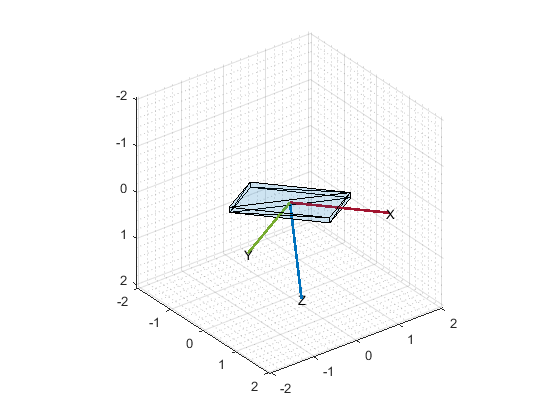
通过融合从IMU接收到的数据跟踪头的方向,然后利用头相关传递函数(HRTF)控制声源到达的方向。
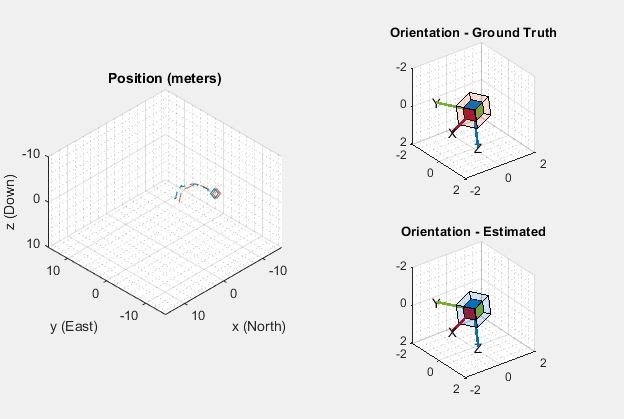
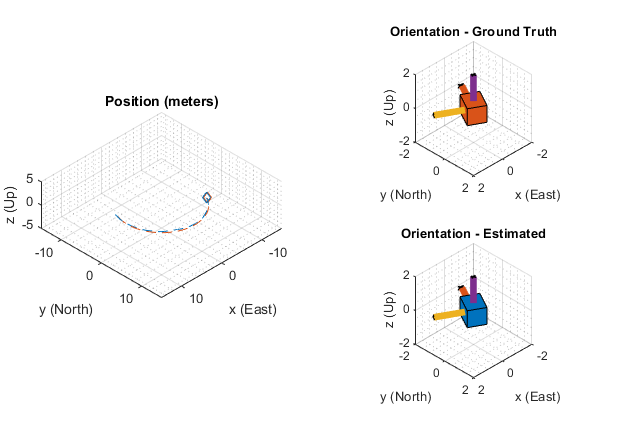
这个例子展示了如何使用6轴和9轴融合算法来计算方向。
这个示例展示了如何对齐和预处理已记录的传感器数据。
这个例子展示了如何使用球面线性插值(SLERP)来创建四元数序列和低通滤波器噪声轨迹。
这个例子展示了如何以不同的速度融合传感器来估计姿态。
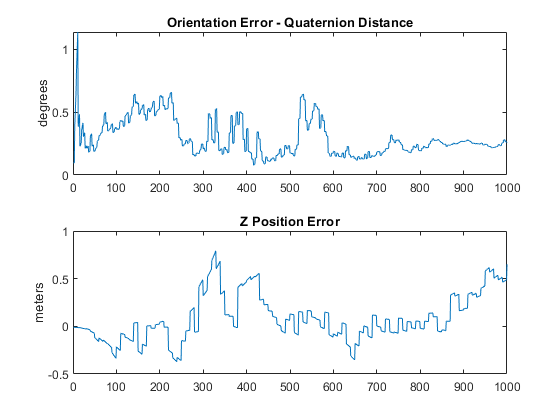
惯性传感器融合滤波器的适用性和局限性。
这个例子展示了如何从Arduino传输IMU数据,并使用互补过滤器估计方向。
该示例演示了如何从InvenSense MPU-9250 IMU传感器获取数据,并在传感器数据中使用6轴和9轴融合算法来计算设备的方向。
此示例显示如何通过HC-05 Bluetooth®模块从Bosch BNO055 IMU传感器获取数据,并在传感器数据上使用9轴AHRS融合算法来计算设备的方向。
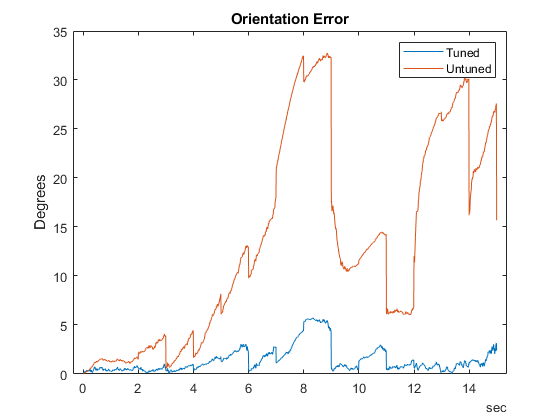
使用调优函数优化多个融合滤波器的噪声参数,包括ahrsfilter对象
定位算法
这个例子演示了蒙特卡罗定位(MCL)算法在模拟Gazebo®环境下的TurtleBot®上的应用。
使用matchScans函数来计算一系列激光扫描之间的位姿差。
此示例显示如何使用惯性测量单元(IMU)最小化扫描匹配算法的旋转角度搜索范围。
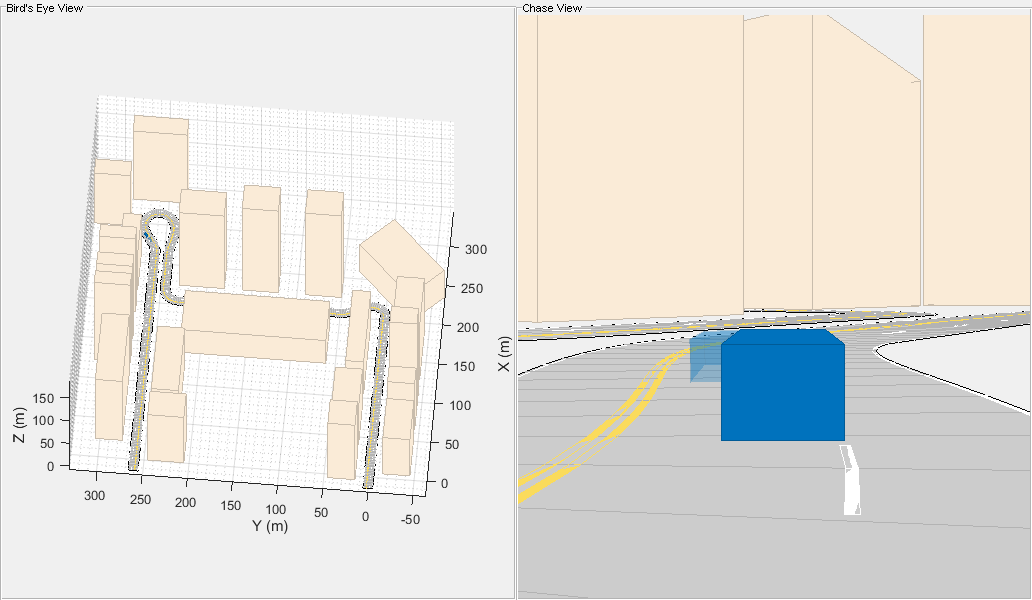
这个例子展示了如何使用三维姿态图优化减少单目摄像机估计轨迹(位置和方向)中的漂移。
采用蒙特卡罗定位(MCL)算法估计机器人的位置和姿态。
使用stateEstimatorPF(Robotics System Toolbox)粒子滤波器,您必须指定参数,如粒子的数量,初始粒子位置,和状态估计方法。
粒子滤波器是一种递归的贝叶斯状态估计器,它使用离散粒子来近似估计状态的后验分布。
特色的例子
你也可以从以下列表中选择一个网站: