matchScansLine
利用线特征估计两次激光扫描之间的姿态
句法
描述
relpose= matchscansline(Curscan.那重新扫描那InitialLeleble.)InitialLeleble.。
[___] = matchscansline(___,名称,价值)使用一个或多个指定选项名称,价值对参数。
例子
估算扫描的姿势与线条特征
此示例显示了如何使用matchScansLine估计LIDAR扫描之间相对姿势的功能给出了初始估计。已识别的线特征被可视化以显示如何扫描匹配算法如何关联扫描之间的功能。
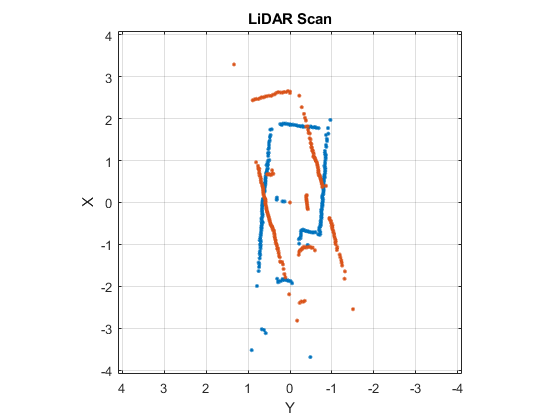
加载一对激光雷达扫描。这。垫文件还包含对相对姿势差异的初始猜测,initGuess,这可以基于内径术或其他传感器数据。
加载tb3_scanPair.mat情节(s1)在情节(s2)离开
设置LINE功能提取和关联的参数。LIDAR数据的噪声确定平滑度阈值,该平滑度阈值定义了针对特定线特征发生线断裂。增加此值以获取更多嘈杂的LIDAR数据。兼容性缩放确定何时被视为匹配。增加此值以在线功能参数上的放宽限制。
光滑肌= 0.2;兼容性= 0.002;
称呼matchScansLine将给定的初始猜测和其他参数指定为名称-值对。该函数计算每一次扫描的线特征,尝试匹配它们,并使用一个总体估计得到姿态的差异。
[relPose, stats, debugInfo] = matchScansLine(s2, s1, initGuess,......'smoothsitythreshold',光滑触头,......“CompatibilityScale”,兼容性尺寸);
匹配扫描结果后调试信息输出为您提供有关检测到的行功能参数的信息,[rhoα]和假设在扫描之间匹配的假设。
debuginfo.matchlypothesis.指出,第一,第二和第六线的特征S1匹配第五,第二和第四个功能S2。
debuginfo.matchlypothesis.
ans =.1×6.5 2 0 0 0 4
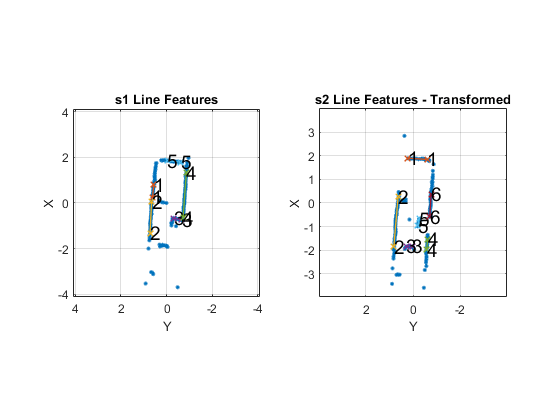
提供的辅助功能绘制这两种扫描和用标签提取的功能。S2基于相对姿势的初始猜测,转换为在同一帧中。
examplehelpershowlinefeaturesscan (s1, s2, debugInfo, initGuess);
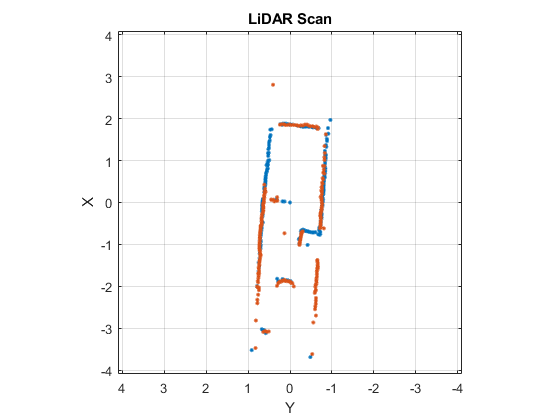
使用估计的相对姿势matchScansLine转换S2。然后,绘制两个扫描以表明相对姿态差异是准确的,并且扫描覆盖以显示相同的环境。
s2t = transformScan (s2, relPose);clf情节(s1)在绘图(S2T)保持离开
输入参数
输出参数
参考文献
[1] Neira,J.和J.D.塔多斯。“随机映射中的数据关联使用联合兼容性测试。”机器人和自动化的IEEE交易17,不。6(2001):890-97。https://doi.org/10.1109/70.976019。
[2]沉,小通,艾米利奥Frazzoli,Daniela Rus和Marcelo H. Ang。“快速联合兼容性分支和特征云匹配的绑定。”2016 IEEE/RSJ智能机器人与系统国际会议(IROS),2016年。https://doi.org/10.1109/iros.2016.7759281。
您还可以从以下列表中选择一个网站: