optimizePoseGraph
优化姿态图中的节点
语法
描述
updatedGraph= optimizePoseGraph (poseGraph)
这种姿态图优化假设所有的边约束和环闭包都是有效的。要考虑基于坏循环闭包修剪边,请参阅trimLoopClosures函数。
updatedGraph= optimizePoseGraph (poseGraph,解算器)
[中的优化过程的附加统计信息updatedGraph,solutionInfo) = optimizePoseGraph (___)solutionInfo使用任何前面的语法。
[___) = optimizePoseGraph (___,使用一个或多个指定其他选项名称,值)名称,值对。例如,“MaxIterations”,1000年将最大迭代次数增加到1000。
例子
优化3-D姿势图
基于节点和边约束的位姿图优化。本例中使用的姿势图取自麻省理工学院的数据集是利用从停车场提取的信息生成的。
从MIT数据集加载姿态图。检查poseGraph3D对象,以查看节点和循环闭包的数量。
负载parking-garage-posegraph.matpgdisp (pg);
poseGraph3D与属性:NumNodes: 1661 nummedges: 6275 NumLoopClosureEdges: 4615 LoopClosureEdgeIDs: [1x4615 double] LandmarkNodeIDs: [1x0 double]
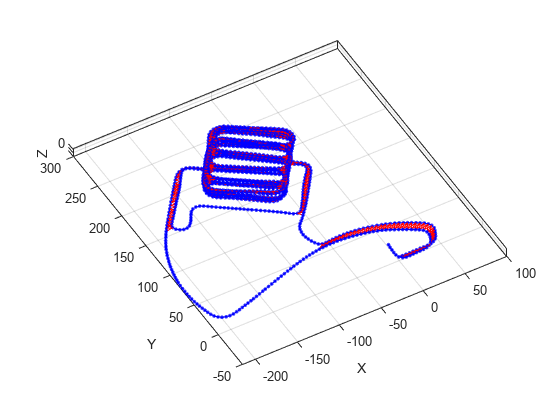
在没有id的情况下绘制姿态图。红线表示在数据集中标识的循环闭包。
标题(“原来的姿势图”)显示(pg,“id”,“关闭”);视图(-30,45)
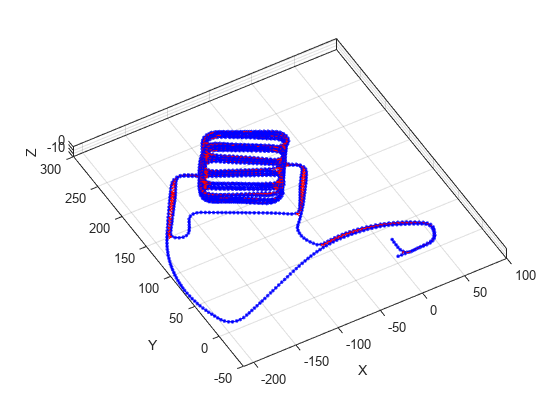
优化姿势图。节点根据边缘约束和循环闭包进行调整。绘制优化的姿态图,以查看节点与循环闭包的调整。
updatedPG = optimizePoseGraph (pg);图的标题(“更新姿势图”)显示(updatedPG“id”,“关闭”);视图(-30,45)
输入参数
输出参数
参考文献
[1] Grisetti, G., R. Kummerle, C. Stachniss, W. Burgard。“基于图形的SLAM教程”。IEEE智能交通系统杂志.第2卷第4期,2010年,第31-43页。doi: 10.1109 / mits.2010.939925。
Carlone, Luca, Roberto Tron, Kostas Daniilidis和Frank Dellaert。三维SLAM的初始化技术:旋转估计及其在位姿图优化中的应用综述2015 IEEE机器人与自动化国际会议(ICRA).2015年,页4597 - 4604。
扩展功能
另请参阅
功能
对象
你也可以从以下列表中选择一个网站: