大满贯
2-D和3-D同步定位和绘图
应用程序
| 大满贯地图生成器 | 使用基于lidar的SLAM建立二维网格地图 |
对象
lidarSLAM |
使用激光雷达扫描进行定位和绘图 |
poseGraph |
创建二维姿态图 |
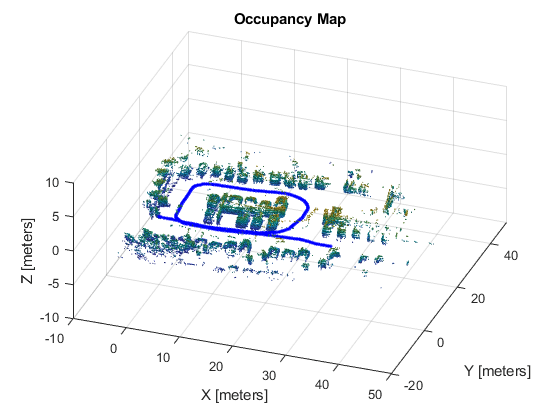
poseGraph3D |
创建三维姿态图 |
功能
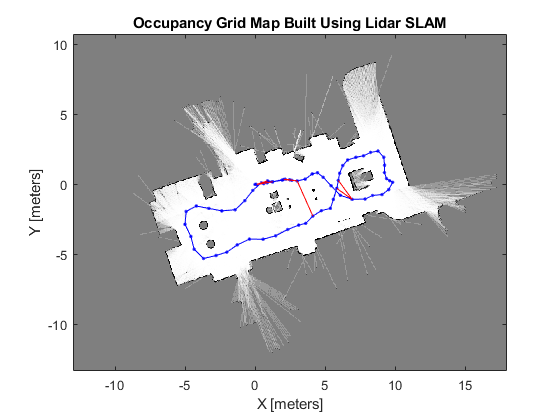
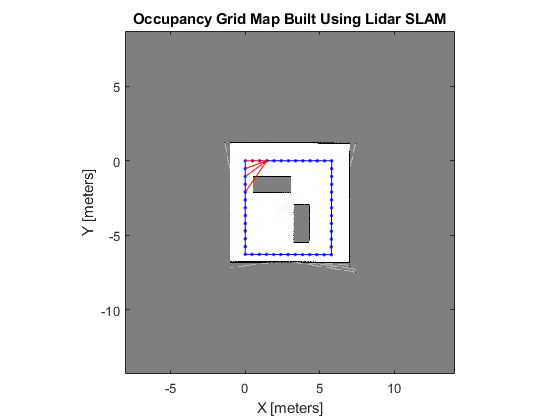
buildMap |
建立占位地图从激光雷达扫描 |
addScan |
增加扫描到激光雷达SLAM地图 |
addRelativePose |
在位姿图中加入相对位姿 |
optimizePoseGraph |
优化位姿图中的节点 |
removeLoopClosures |
从姿态图中删除循环闭包 |
scansAndPoses |
提取扫描和相应的姿势 |
特色的例子
您也可以从以下列表中选择一个网站: