主要内容
scansAndPoses
提取扫描和相应的姿势
描述
例子
使用激光雷达扫描执行SLAM
使用一个lidarSLAM对象迭代添加和比较激光雷达扫描,并构建机器人轨迹的优化姿态图。要从相关的姿势和扫描中获取占用图,请使用buildMap函数。
加载数据并设置SLAM算法
的单元格数组lidarScan对象。激光雷达扫描是由ClearPath Robotics公司的Husky®机器人在停车场收集的。通常情况下,激光雷达的扫描频率很高,而且SLAM不需要每次扫描。因此,通过只选择每40次扫描来对扫描进行采样。
负载garage_fl1_southend.mat扫描扫描=扫描(1:40:结束);
为了建立SLAM算法,需要指定激光雷达的范围、地图分辨率、环路闭合阈值和搜索半径。针对特定的机器人和环境调整这些参数。创建lidarSLAM对象使用这些参数。
maxRange = 19.2;%米分辨率= 10;每米细胞百分比slamObj = lidarSLAM(分辨率,maxRange);slamObj。LoopClosureThreshold = 360;slamObj。LoopClosureSearchRadius = 8;
迭代添加扫描
使用一个为循环,添加扫描到SLAM对象。对象使用扫描匹配将每个添加的扫描与之前添加的扫描进行比较。为了改进映射,对象会在检测到循环闭包时优化姿态图。每10次扫描,显示存储的姿势和扫描。
为i = 1:数字(扫描)addScan(slamObj,扫描{i});如果rem(i,10) == 0 show(slamObj);结束结束
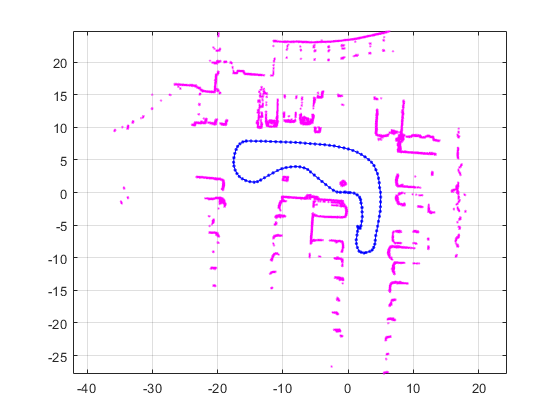
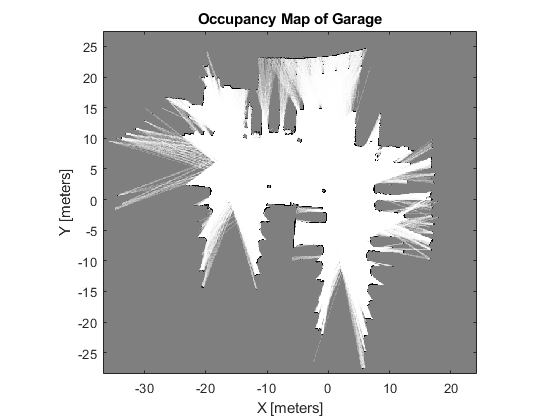
查看占用率图
将所有扫描添加到SLAM对象后,构建一个occupancyMap通过调用映射buildMap扫描和摆姿势。使用与SLAM对象相同的映射分辨率和最大范围。
[scansSLAM,pose] = scansandpose (slamObj);occMap = buildMap(扫描slam,姿势,分辨率,maxRange);图显示(occMap)“车库占用图”)
输入参数
输出参数
扩展功能
R2019b引入
您也可以从以下列表中选择一个网站: