主要内容
plannerRRT
创建一个RRT计划器用于几何规划
描述
的plannerRRT对象创建一个快速探索随机树(RRT)规划器,以解决几何规划问题。RRT是一种基于树的运动规划器,它从给定的状态空间中随机抽取样本,逐步构建搜索树。树最终跨越了搜索空间,并将开始状态连接到目标状态。树木生长的一般过程如下:
计划器采样一个随机状态x兰德在状态空间中。
规划者找到一个状态x附近它已经在搜索树中,并且最接近(基于状态空间中的距离定义)x兰德。
规划者从x附近对x兰德,直到一个州x新是达到了。
然后新的状态x新添加到搜索树中。
对于几何RRT,两种状态之间的展开和连接可以在不违反规划对象状态空间中规定的约束条件下解析地找到。
创建
描述
规划师= plannerRRT (stateSpace,stateVal)stateSpace,以及一个状态验证器对象,stateVal。的状态空间stateVal一定是一样的stateSpace。stateSpace和stateVal还设置了StateSpace和StateValidator的属性规划师。
属性
例子
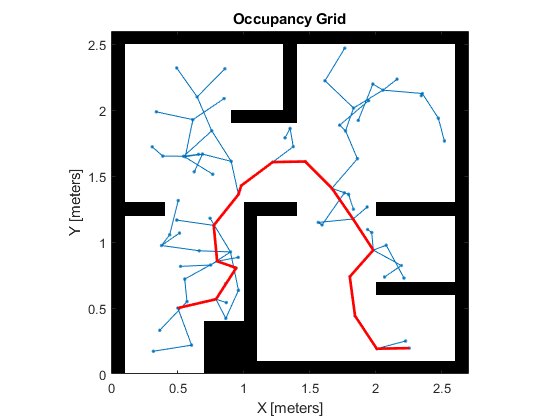
规划两国之间的道路
创建状态空间。
党卫军= stateSpaceSE2;
创建一个occupanyMap使用创建的状态空间的基于状态验证器。
sv = validatorOccupancyMap (ss);
从一个示例地图创建一个占用地图,并设置地图分辨率为10单元格/米。
负载exampleMaps地图= occupancyMap (simpleMap 10);sv。地图=地图;
设置验证器的验证距离。
sv。ValidationDistance = 0.01;
将状态空间边界更新为与映射限制相同的状态空间边界。
ss.StateBounds = [map.XWorldLimits; map.YWorldLimits;[-ππ]];
创建路径规划器并增加最大连接距离。
规划师= plannerRRT (ss、sv);计划。MaxConnectionDistance = 0.3;
设定开始和目标状态。
开始= (0.5,0.5,0);目标= (2.5,0.2,0);
使用默认设置规划路径。
rng (100“旋风”);%为可重复的结果[pthObj, solnInfo] =计划(计划,开始,目标);
可视化结果。
显示(map)在情节(solnInfo.TreeData (: 1) solnInfo.TreeData (:, 2),“。”);%树扩张情节(pthObj.States (: 1) pthObj.States (:, 2),的r -,“线宽”, 2)%画出路径
参考文献
[1] S.M. Lavalle和J.J. Kuffner。“随机Kinodynamic计划。”国际机器人研究杂志。Vol. 20, Number 5, 2001, pp. 378 - 400。
扩展功能
介绍了R2019b
你也可以从以下列表中选择一个网站: