主要内容
plannerRRTStar
创建最佳RRT路径规划器(RRT *)
描述
的plannerRRTStar对象创建一个渐近最优的RRT规划器,RRT*。RRT*算法根据状态空间距离收敛到最优解。而且,它的运行时间是RRT算法运行时间的常数因子。RRT*用于求解几何规划问题。几何规划问题要求状态空间中任意两个随机状态可以连通。
创建
描述
策划者= plannerrrtstar(标准空间,stateVal)标准空间,和状态验证器对象,stateVal.的状态空间stateVal一定和标准空间.标准空间和stateVal还设置了StateSpace和StateValidator.的属性策划者目的。
属性
例子
计划两个州之间的最佳路径
创建一个状态空间。
党卫军= stateSpaceSE2;
创建一个occupancyMap基于状态验证器,使用创建的状态空间。
SV = Validatoroccupancymap(SS);
从示例地图创建占用映射并将地图分辨率设置为10个单元/仪表。
负载exampleMaps.mat地图=占领扬(SimpleMap,10);sv.map = map;
为验证器设置验证距离。
sv。ValidationDistance = 0.01;
更新状态空间范围与地图限制相同。
ss.statebounds = [map.xworldlimits;map.yworldlimits;[-pi pi]];
创建RRT*路径规划器,并允许在达到目标后进一步优化。
规划师= plannerRRTStar (ss、sv);计划。ContinueAfterGoalReached = true;
减少最大迭代次数,增加最大连接距离。
规划师..AxIterations = 2500;Planner.MaxConnectionDistance = 0.3;
设定开始和目标状态。
开始= [0.5,0.5 0];目标= [2.5,0.2,0];
使用默认设置计划路径。
rng (100“旋风”)%可重复的结果[Pthobj,Solninfo] =计划(计划者,开始,目标);
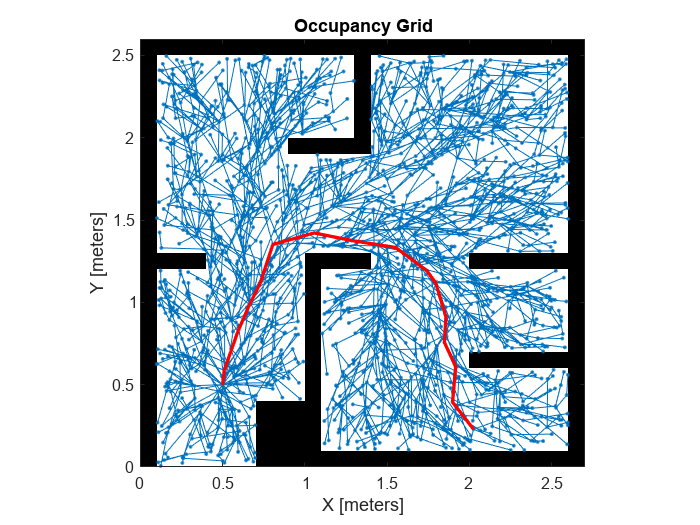
可视化结果。
map.show;持有在;plot(solninfo.tredata(:,1),solninfo.tredata(:,2),“。”);%树扩展plot(pthobj.states(:,1),pthobj.states(:,2),的r -,“线宽”2);%画出路径
参考
[1] Karaman,S.和E. Frazzoli。“基于采样的最佳运动规划算法。”国际机器人研究杂志。第30卷第7期,2011年,第846 - 894页。
扩展功能
介绍了R2019b
您还可以从以下列表中选择一个网站: