vision.labeler.loading.RosbagSource类
包:vision.labeler.loading
超类:vision.labeler.loading.MultiSignalSource
从rosbag源加载信号到地面真相标签应用程序
描述
的vision.labeler.loading.RosbagSource类创建接口,用于将信号从rosbag文件加载到地面真相标签在app的“添加/移除信号”对话框中,当源类型设置为Rosbag,该类控制该对话框中的参数。
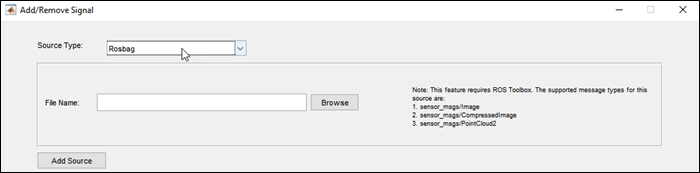
要访问此对话框,请在应用程序中选择进口>添加信号.
该类的默认实现从这些ROS消息类型加载信号:
sensor_msgs /形象sensor_msgs / CompressedImagesensor_msgs / PointCloud2
请注意
这门课要求ROS工具箱.
的vision.labeler.loading.RosbagSource类是一个处理类。
创建
中导出标签时地面真相标签应用程序会话,包含rosbag源,导出groundTruthMultisignal对象中存储该类的实例数据源财产。
要创建RosbagSource对象时,例如以编程方式创建groundTruthMultisignal对象时,使用vision.labeler.loading.RosbagSource函数(此处描述)。
描述
rosbagSource= vision.labeler.loading.RosbagSourceRosbagSource对象用于从rosbag数据源加载信号。要指定加载源所需的数据源和参数,请使用loadSource方法。
属性
方法
提示
您可以将该类作为创建自定义数据源加载类的起点。要查看这个类的源代码,使用这个命令:
编辑vision.labeler.loading.RosbagSource
版本历史
R2020a中引入
您也可以从以下列表中选择一个网站: