ctrectjac
八匝率矩形目标运动模型的雅各
描述
例子
输入参数
状态-当前状态
1×7实值向量
当前状态,指定为1×7实值向量。恒定回转矩形目标模型的SATE是[X;y;S.;θ.;ω.;L.;W.]。这些变量的含义和自己的单位有:
| 多变的 | 意义 | 单元 |
| X | 在矩形中心的位置X方向 |
m |
| y | 在矩形中心的位置y方向 |
m |
| S. | 速度在前进方向 |
多发性硬化症 |
| θ. | 相对于矩形的取向角X方向 |
程度 |
| ω. | 打开率 |
度/秒 |
| L. | 矩形的长度 |
m |
| W. | 矩形的宽度 |
m |
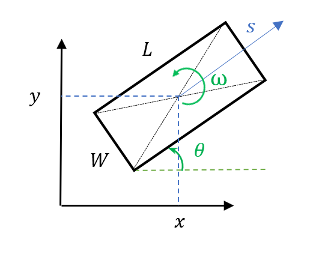
例子:[1; 2; 2; 30; 1; 4.7; 1.8]
数据类型:单身的|双倍的
DT.-时间步长
实值正标量
时间步长,指定为第二真实值正标量。
数据类型:单身的|双倍的
W.-过程噪声
真正的标量|2元件实值向量
过程噪声,指定为2元件实值向量。第一元素指定噪声的过程中线性加速度(米/秒2)。第二个元素指定在摇摆加速度(度/秒的处理噪声2)。
数据类型:单身的|双倍的
输出参数
扩展能力
在R2019B中介绍
您还可以从以下列表中选择一个网站: