cuboidModel
参数长方体模型
描述
的cuboidModel对象存储参数化长方体模型的参数。创建一个cuboidModel对象,您可以使用对象函数提取长方体的角点,以及长方体内的点。的输出用长方体模型来存储pcfitcuboid函数。它是一个形状拟合函数,在点云上拟合一个长方体。
属性
参数- - - - - -长方体模型参数
九元行向量
此属性是只读的。
长方体模型参数,存储为形式为[的九元行向量xctryctrzctrxlenylenzlenx腐烂y腐烂z腐烂].
xctr,yctr,zctr指定长方体的中心。
xlen,ylen,zlen的长方体的长度x- - - - - -,y- - - - - -,z-轴,分别在应用旋转之前。
x腐烂,y腐烂,z腐烂指定长方体沿的旋转角度x- - - - - -,y- - - - - -,z分别设在。从它们对应轴的正向看,这些角都是顺时针正的。
该图显示了这些值如何确定长方体的位置。

参数指定这些参数参数个数输入参数。
数据类型:单|双
中心- - - - - -长方体的中心
三元行向量
此属性是只读的。
长方体的中心,存储为形式为[的三元素行向量xctryctrzctr].向量中长方体中心的三维坐标x- - - - - -,y- - - - - -,z分别设在。
属性派生自参数财产。
数据类型:单|双
维- - - - - -长方体的尺寸
三元行向量
此属性是只读的。
长方体的尺寸,存储为形式为[的三元素行向量xlenylenzlen].这个向量包含了长方体的长度x- - - - - -,y- - - - - -,z分别设在。
属性派生自Paramareters财产。
数据类型:单|双
取向- - - - - -长方体的方位
三元行向量
此属性是只读的。
长方体的方向,存储为形式为[x腐烂y腐烂z腐烂,以度为单位。这个向量包含了长方体沿x- - - - - -,y- - - - - -,z分别设在。
属性派生自Paramareters财产。
数据类型:单|双
对象的功能
getCornerPoints |
得到长方体模型的角点 |
findPointsInsideCuboid |
求出由长方体模型包围的点 |
情节 |
图长方体模型 |
例子
在点云中检测长方体
在点云中检测一个长方体pcfitcuboid函数。函数将长方体参数存储为acuboidModel对象。
将点云数据读入工作空间。
ptCloud = pcread(“highwayScene.pcd”);
在指定的感兴趣区域(ROI)内搜索点云。只创建检测到的点云。
ROI = [-30 30 -20 30 -8 13];in = findPointsInROI(ptCloud,roi);ptCloudIn = select(ptCloud,in);
绘制被检测点的点云。
图pcshow(ptCloudIn.Location) xlabel(“X (m)”) ylabel (“Y (m)”) zlabel (“Z (m)”)标题(“ROI检测点”)

在点云中查找指定ROI中的点的索引。
ROI = [9.6 13.8 7.9 9.3 -2.5 3];sampleIndices = findPointsInROI(ptCloudIn,roi);
将长方体与点云中所选的点集拟合。
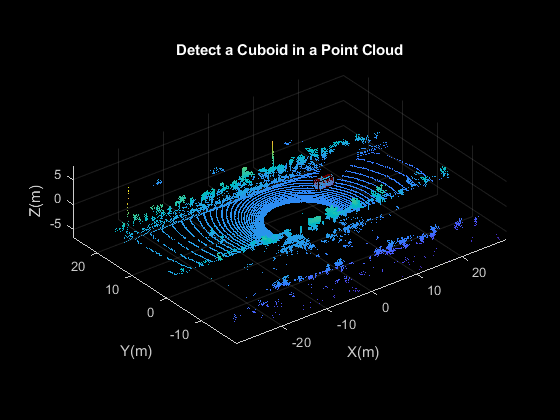
模型= pcfitcuboid(ptCloudIn,sampleIndices);图pcshow(ptCloudIn.Location) xlabel(“X (m)”) ylabel (“Y (m)”) zlabel (“Z (m)”)标题(“在点云中探测长方体”)
在点云中画出长方体。
持有在情节(模型)
控件的内部属性cuboidModel对象。
模型
参数:[11.4873 8.5997 -1.6138 3.6713 1.3220 1.7576 0 0.9999]中心:[11.4873 8.5997 -1.6138]尺寸:[3.6713 1.3220 1.7576]方向:[0 0 0.9999]
在点云数据上拟合长方体
在点云中的群集周围拟合长方体边界框。
将点云数据加载到工作区中。
数据=负载(“drivingLidarPoints.mat”);
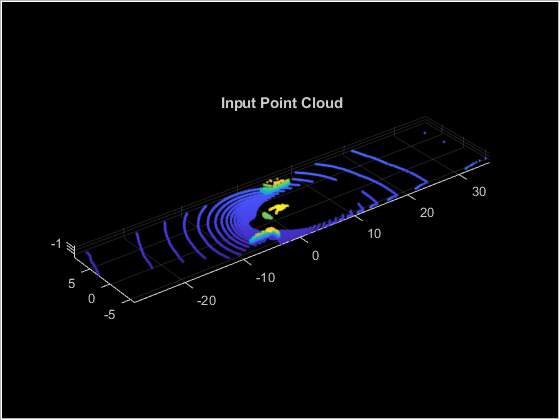
从点云中定义并裁剪感兴趣的区域(ROI)。可视化点云所选的ROI。
ROI = [-40 40 -6 9 -2 1];in = findPointsInROI(data.ptCloud,roi);ptCloudIn = select(data.ptCloud,in);Hcluster =图;面板= uipanel(“父”hcluster,“写成BackgroundColor”,[0 0 0]);Ax = axes(“父”面板,“颜色”,[0 0 0]);pcshow (ptCloudIn“MarkerSize”30岁的“父”ax)标题(“输入点云”)
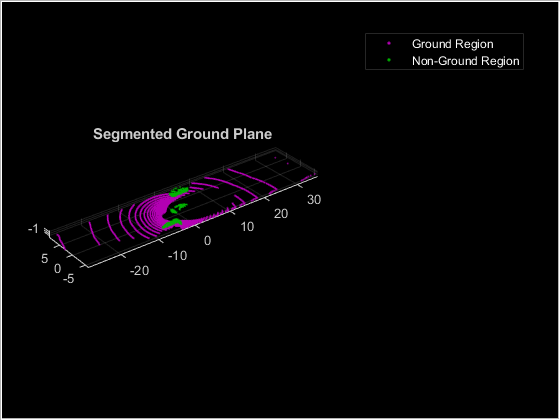
分割接地面。可视化分割的地平面。
maxDistance = 0.3;referenceVector = [0 0 1];[~,inliers,outliers] = pcfitplane(ptCloudIn,maxDistance,referenceVector);ptCloudWithoutGround = select(ptclouddin,outliers,“OutputSize”,“全部”);hSegment =图;面板= uipanel(“父”hSegment,“写成BackgroundColor”,[0 0 0]);Ax = axes(“父”面板,“颜色”,[0 0 0]);pcshowpair (ptCloudIn ptCloudWithoutGround,“父”ax)传说(“地面区域”,“Non-Ground地区”,“输入TextColor”,[1 1 1])标题(“分段地平面”)
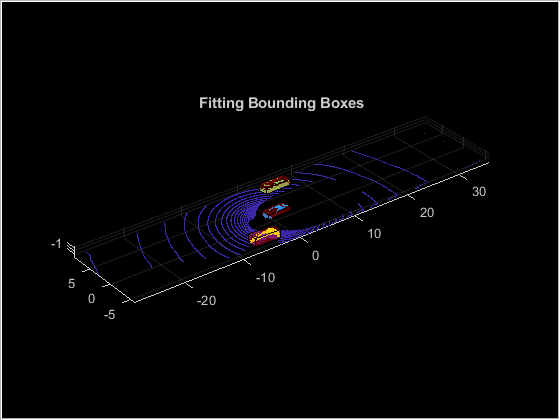
将点云的非地面区域分割成簇。可视化分割的点云。
distThreshold = 1;[labels,numClusters] = pcsegdist(ptCloudWithoutGround,distThreshold);labelColorIndex =标签;hCuboid =图;面板= uipanel(“父”hCuboid,“写成BackgroundColor”,[0 0 0]);Ax = axes(“父”面板,“颜色”,[0 0 0]);pcshow (ptCloudIn。位置、labelColorIndex“父”ax)标题(“设置边界框”)举行在
在每个集群上安装边界框,以橙色高光显示。
为i = 1:numClusters idx = find(labels == i);model = pcfitcuboid(ptCloudWithoutGround,idx);情节(模型)结束
扩展功能
另请参阅
功能
对象
您也可以从以下列表中选择网站: