detectRectangularPlanePoints
Syntax
Description
ptCloudPlanes= detectRectangularPlanePoints(ptCloudIn,planeDimensions)ptCloudPlanes, of specified dimensions,planeDimensions, from the input point cloudptCloudIn.
[detects rectangular planes from a set of point clouds,ptCloudPlanes,ptCloudUsed] = detectRectangularPlanePoints(ptCloudArray,planeDimensions)ptCloudArray. In addition, the function returns a logical vector,ptCloudUsed, that indicates the point clouds in which it detected a rectangular plane.
[___] = detectRectangularPlanePoints(detects rectangular planes from a set of point cloud files,ptCloudFileNames,planeDimensions)ptCloudFileNames, and returns any combination of output arguments from previous syntaxes.
[returns indices to the points within the detected rectangular plane in each point cloud, in addition to any previous combination of arguments.ptCloudPlanes,ptCloudUsed,indicesCell] = detectRectangularPlanePoints(___)
[___] = detectRectangularPlanePoints(___,specifies options using one or more name-value pair arguments. For example,Name,Value)'RemoveGround',truesets the'RemoveGround'flag to true, which removes the ground plane from the input point cloud before processing.
Examples
Detect Checkerboard Plane in Point Cloud
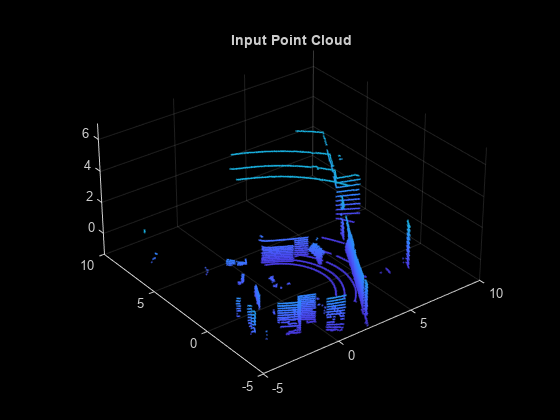
Load point cloud data into the workspace. Visualize the input point cloud.
ptCloud = pcread('pcCheckerboard.pcd'); pcshow(ptCloud) title('Input Point Cloud') xlim([-5 10]) ylim([-5 10])
Set the search dimensions for the rectangular plane.
boardSize = [729 810];
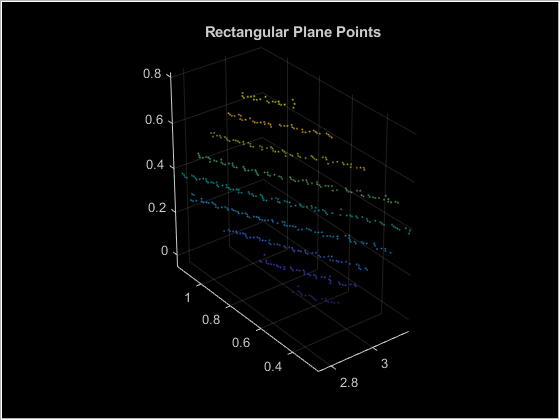
Search for the rectangular plane in the point cloud. Visualize the detected rectangular plane.
lidarCheckerboardPlane = detectRectangularPlanePoints(ptCloud,boardSize,...'RemoveGround',true); hRect = figure; panel = uipanel('Parent',hRect,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(lidarCheckerboardPlane,'Parent',ax) title('Rectangular Plane Points')
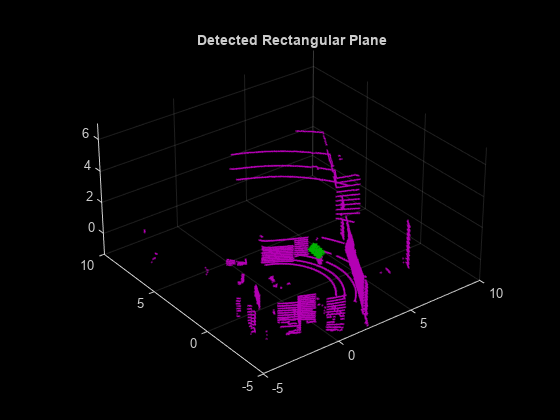
Visualize the detected rectangular plane on the input point cloud.
figure pcshowpair(ptCloud,lidarCheckerboardPlane) title('Detected Rectangular Plane') xlim([-5 10]) ylim([-5 10])
Input Arguments
Output Arguments
Version History
Introduced in R2020b
See Also
Functions
Topics
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)