主要内容
校准和传感器融合
交互式地执行校准,估计激光相机转换,并融合每个传感器的数据
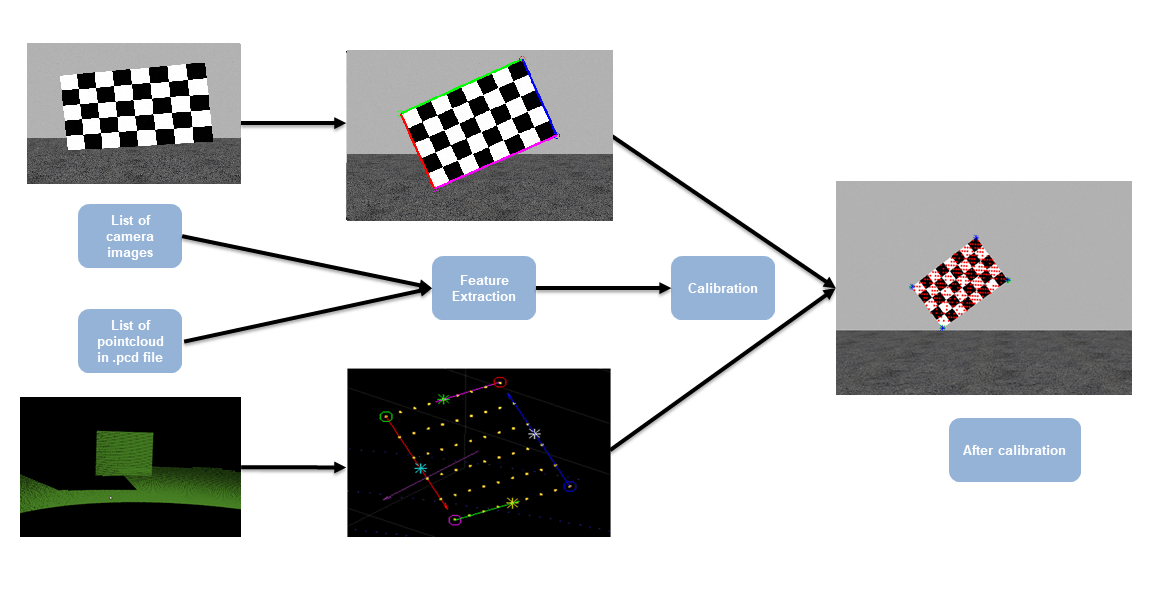
大多数现代自动或半自动驾驶汽车都配备了包含多个传感器的传感器套件。有必要建立这些传感器之间的几何对应关系,以理解和关联输出数据。为了校准和融合来自这些传感器的数据,需要进行旋转和平移变换。将激光雷达数据与相应的摄像机数据融合在感知管道中特别有用。激光雷达和摄像机校准(LCC)工作流程就是为此服务的。采用棋盘格模式标定方法。想要了解更多,请看什么是LIDAR相机校准?。
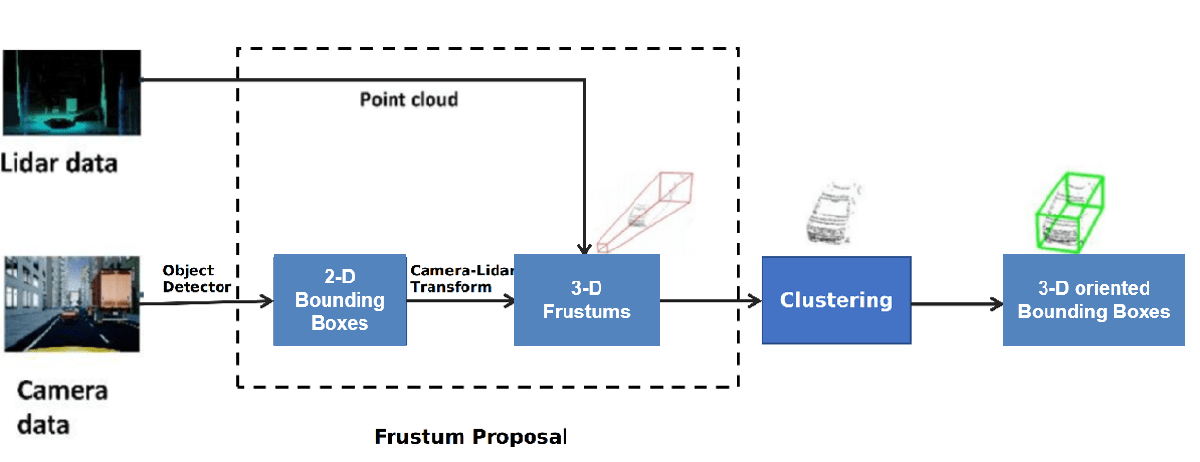
激光雷达工具箱™算法提供从图像和点云提取棋盘特征的功能,并使用它们来估计相机和激光雷达传感器之间的转换。工具箱还提供下游LCC功能,将激光雷达点投影到图像上,融合激光雷达点云中的颜色信息,并将边界框从相机数据传输到激光雷达数据。所有这些功能已经集成到激光器相机校准器应用程序。使用应用程序,您可以交互式校准传感器。
应用
| 激光器相机校准器 | 互联区估计LIDAR传感器和相机之间的刚性变换 |
职能
主题
整合LIDAR和相机数据。
这些准则和程序适用于LIDAR-Camera校准。
交互式校准激光器和相机传感器。
此示例显示了如何从ROSBAG文件读取和保存图像和点云数据。
特色例子
您还可以从以下列表中选择一个网站: