主要内容
projectLidarPointsOnImage
将LIDAR点云数据投影到图像坐标帧
语法
描述
[___]=项目LIDARPOINTSONIMAGE(___,除了以前语法中的任何参数组合之外,使用一个或多个名称值对参数指定选项。例如,名称、值)'拍摄',[250 400]将要在其上投影点的图像大小设置为250×400像素。
例子
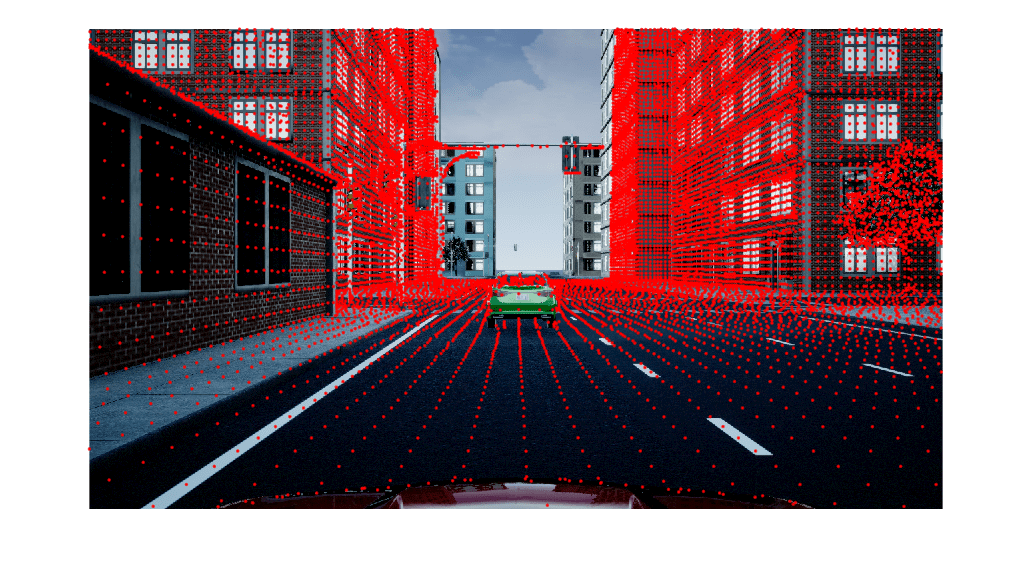
在图像上叠加投影的激光雷达点
将地面实况数据从MAT文件加载到工作区。从地面实况数据中提取图像和点云数据。
datapath = fullfile(toolboxdir(“激光雷达”),“利达达达”,“lcc”,“sampleColoredPtCloud.mat”); gt=负载(数据路径);img=gt.im;pc=gt.ptCloud;
从地面真实数据中提取摄像机的固有参数。
内在= gt.camparams;
从地面真值数据中提取相机到激光雷达的变换矩阵,并反转以找到激光雷达到相机的变换矩阵。
tform =反转(gt.tform);
拆下点云数据。
p1=pc下采样(pc,“网格平均”,0.5);
将点云投影到图像框架上。
imPts=projectLidarPointsOnImage(p1,本质,tform);
覆盖图像上的投影点。
图imshow(img)持有在绘图(输入(:,1),输入(:,2),'.','颜色',“r”) 抓住离开
输入参数
输出参数
扩展能力
在R2020b中引入
您还可以从以下列表中选择一个网站: