主要内容
extractEigenFeatures
从点云线段中提取基于特征值的特征
描述
特性= extractEigenFeatures (segmentsIn)segmentsIn.使用此语法可以方便地在点云扫描中选择特定的片段进行局部特征提取。
[此外,还使用以前语法中的任何参数组合返回从输入点云提取的线段。使用此语法有助于分段的可视化。特性,segmentsOut) = extractEigenFeatures (___)
例子
从点云提取基于特征值的特征
加载有组织的激光雷达点云。
ld =负载(“drivingLidarPoints.mat”);ptCloud = ld.ptCloud;
拆下接地面。
groundPtsIdx = segmentGroundFromLidarData (ptCloud,“升降角度增量”15);ptCloud =选择(ptCloud ~ groundPtsIdx,“OutputSize”,“满”);
对剩余点进行聚类,每个聚类至少50个点。
距离阈值=0.5;%在米最小点数=50[标签、numClusters]=分段LidarData(ptCloud、distThreshold、,“NumClusterPoints”, minPoints);
从点云中提取基于特征值的特征及其对应的段。
(特性、段)= extractEigenFeatures (ptCloud、标签)
特征=17×1对象16x1特征特征阵列,具有以下特性:特征质心⋮
段=17×1对象16x1 pointCloud数组带有属性:Location Count XLimits YLimits ZLimits Color Normal Intensity⋮
点云之间基于特征值的特征匹配
创建Velodyne PCAP文件读取器。
veloReader = velodyneFileReader (“lidarData_ConstructionRoad.pcap”,“HDL32E”);
从文件中读取第一次和第四次扫描。
ptCloud1 = readFrame (veloReader, 1);ptCloud2 = readFrame (veloReader 4);
从扫描中移除接地面。
maxDistance = 1;%在米referenceVector = [0 0 1];[~, ~, selectIdx] = pcfitplane (ptCloud1、maxDistance referenceVector);ptCloud1 =选择(ptCloud1 selectIdx,“OutputSize”,“满”);[~, ~, selectIdx] = pcfitplane (ptCloud2、maxDistance referenceVector);ptCloud2 =选择(ptCloud2 selectIdx,“OutputSize”,“满”);
以每个簇至少10个点对点云进行聚类。
思维距离=2;%在米最小点数=10;标签1=pcsegdist(ptCloud1,MindDistance,“NumClusterPoints”,分);标签2=pcsegdist(ptCloud2,MindDistance,“NumClusterPoints”, minPoints);
从每个点云中提取特征值特征和对应的段。
[eigFeatures1, segments1] = extractEigenFeatures (ptCloud1 labels1);[eigFeatures2, segments2] = extractEigenFeatures (ptCloud2 labels2);
从每个点云中提取的特征和质心创建矩阵,用于匹配。
features1=vertcat(EIGFeaatures1.Feature);features2=vertcat(eigFeatures2.Feature);质心1=顶点(EIG特征1.质心);质心2=顶点(EIG特征2.质心);
查找假定的特征匹配项。
indexPairs=pcmatchfeatures(特征1、特征2、,...点云(质心1)、点云(质心2);
获取匹配的片段和特征以进行可视化。
matchedSegments1 = segments1 (indexPairs (: 1));matchedSegments2 = segments2 (indexPairs (:, 2));matchedFeatures1 = eigFeatures1 (indexPairs (: 1));matchedFeatures2 = eigFeatures2 (indexPairs (:, 2));
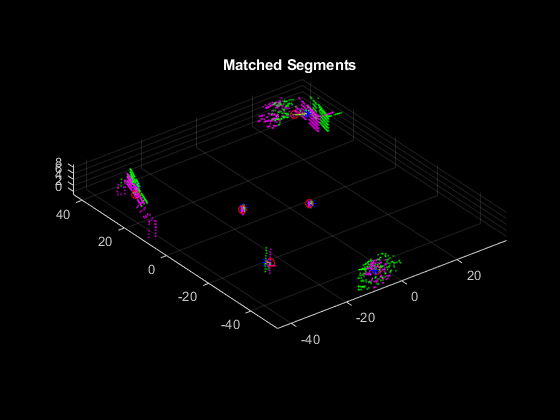
可视化匹配。
图PCshow MatchedFeatures(matchedSegments1、matchedSegments2、matchedFeatures1、matchedFeatures2)标题(“匹配段”)
输入参数
输出参数
工具书类
[1] Weinmann M., B. Jutzi, C. Mallet。语义三维场景解释:一个结合最佳邻域尺寸选择和相关特征的框架。摄影测量、遥感和空间信息科学年鉴II-3(2014年8月7日):181-88。https://doi.org/10.5194/isprsannals-II-3-181-2014.
另请参阅
功能
对象
在R2021a中引入
您还可以从以下列表中选择网站: