在开环控制下运行三相交流电机并校准ADC偏移
本例使用开环控制(也称为标量控制或伏特/赫兹控制)来运行电机。这种技术改变定子电压和频率来控制转子速度,而不使用任何来自电机的反馈。您可以使用这种技术来检查硬件连接的完整性。开环控制的恒速应用使用定频电机电源。开环控制的调速应用需要一个变频电源来控制转子转速。为确保定子磁通量恒定,应保持电源电压幅值与其频率成正比。
开环电机控制没有能力考虑影响电机转速的外部条件。因此,控制系统不能自动纠正电机期望转速与实际转速之间的偏差。
该模型采用开环电机控制算法对电机进行控制。该模型可以帮助您开始使用Motor Control Blockset™,并通过运行电机来验证硬件设置。目标模型算法还从当前传感器读取ADC值,并通过串行通信将这些值发送给主机模型。
你可以使用这个模型:
检查与目标的连通性。
检查与目标器的串行通信。
检查软硬件环境。
检查电流传感器的ADC偏移量。
第一次运行带有逆变器和目标设置的新电机。
模型
该示例包括以下模型:
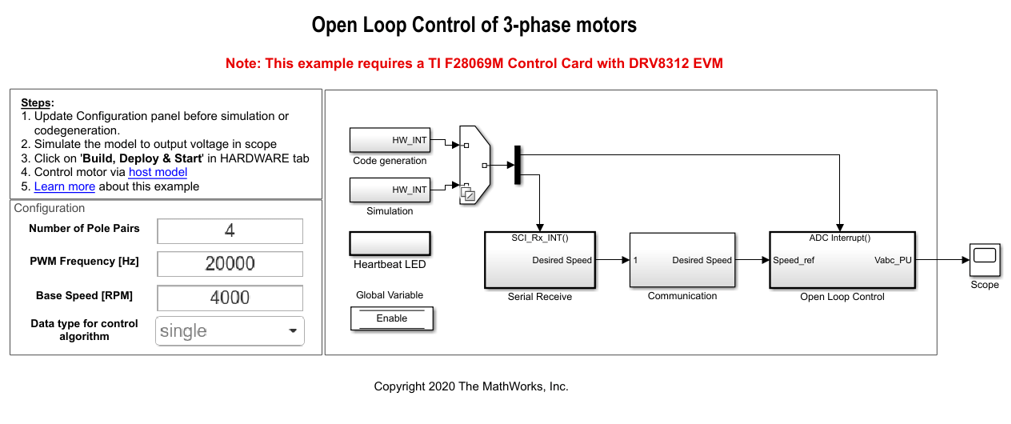
您可以将这些模型用于模拟和代码生成。您还可以使用open_system命令打开Simulink®模型。万博1manbetx以F28069M控制器为例:
open_system (“mcb_open_loop_control_f28069M_DRV8312.slx”);
有关可用于不同硬件配置的模型名称,请参阅生成代码并将模型部署到目标硬件部分中的所需硬件主题。
需要MathWorks®产品s manbetx 845
模拟模型:
1.对于模型:mcb_open_loop_control_f28069M_DRV8312而且mcb_open_loop_control_f28069MLaunchPad
电机控制块集™
定点设计师™
2.对于模型:mcb_open_loop_control_f28379d
电机控制块集™
生成代码并部署模型:
1.对于模型:mcb_open_loop_control_f28069M_DRV8312而且mcb_open_loop_control_f28069MLaunchPad
电机控制块集™
嵌入式编码器®
德州仪器C2000处理器的嵌入式万博1manbetxCoder®支持包
定点设计师™
2.对于模型:mcb_open_loop_control_f28379d
电机控制块集™
嵌入式编码器®
德州仪器C2000处理器的嵌入式万博1manbetxCoder®支持包
定点设计器™(仅用于优化代码生成)
先决条件
1.对于BOOSTXL-DRV8323,使用以下步骤更新模型:
导航到模型中的这个路径:/Open Loop Control/Codegen/Hardware Initialization。
对于LAUNCHXL-F28379D:更新DRV830x启用块从GPIO124到GPIO67。
对于LAUNCHXL-F28069M:更新DRV830x启用块从GPIO50到GPIO12。
2.对于BOOSTXL-3PHGANINV,使用以下步骤更新模型:
对于LAUNCHXL-F28379D:在配置小组mcb_open_loop_control_f28379d,设置逆变使能逻辑来活性低.
注意:使用BOOSTXL-3PHGANINV逆变器时,请确保BOOSTXL-3PHGANINV底层与LAUNCHXL板之间有适当的绝缘。
模拟模型
本例支持模拟。万博1manbetx按照以下步骤模拟模型。
1.打开本示例中包含的模型。
2.点击运行在模拟TAB来模拟模型。
3.点击数据检查在模拟选项卡查看和分析仿真结果。
生成代码并将模型部署到目标硬件
本节将指导您生成代码并使用开环控制来运行电机。
该示例使用一个主机和一个目标模型。主机模型是控制器硬件板的用户界面。您可以在主机计算机上运行主机模型。使用该主机型号的前提是将目标型号部署到控制器硬件板上。主机模型使用串行通信来命令目标Simulink®模型,并在闭环控制中运行电机。万博1manbetx
所需的硬件
本例支持这些硬件配置。万博1manbetx还可以使用目标模型名称从MATLAB®命令提示符打开相应硬件配置的模型。
F28069M控制卡+ DRV8312-69M-KIT逆变器:mcb_open_loop_control_f28069M_DRV8312
与上述硬件配置相关的连接请参见F28069控制卡配置.
LAUNCHXL-F28069M控制器+ (BOOSTXL-DRV8301或BOOSTXL-DRV8305或BOOSTXL-DRV8323或BOOSTXL-3PHGANINV)逆变器:mcb_open_loop_control_f28069MLaunchPad
LAUNCHXL-F28379D控制器+ (BOOSTXL-DRV8301或BOOSTXL-DRV8305或BOOSTXL-DRV8323或BOOSTXL-3PHGANINV)变频器:mcb_open_loop_control_f28379d
要配置模型mcb_open_loop_control_f28379d,设置逆变使能逻辑域(在配置目标模型面板)到:
活性高:使用型号为BOOSTXL-DRV8301或BOOSTXL-DRV8305或BOOSTXL-DRV8323的逆变器。
活性低:使用型号为BOOSTXL-3PHGANINV逆变器。
上述硬件配置的相关连接请参见LAUNCHXL-F28069M和LAUNCHXL-F28379D配置.
注意:
本例支持任何类型的三相交流万博1manbetx电机(PMSM或感应)和任何类型的逆变器连接到所支持的硬件。
一些永磁同步电动机不能以更高的速度运行,特别是当轴加载时。要解决这个问题,您应该应用与给定频率对应的更多电压。您可以使用以下步骤来增加模型中的应用电压:
1.导航到模型中的这个路径:/Open Loop Control/Control_System/VabcCalc/。
2.将增益Correction_Factor_sinePWM更新为20%。
3.为安全起见,应定期监测电机轴、电机电流和电机温度。
生成代码并运行模型以实现开环控制
1.对目标模型进行仿真,观察仿真结果。
2.完成硬件连接。
3.打开要使用的硬件配置的目标模型。如果要更改目标型号的默认硬件配置设置,请参见型号配置参数.
4.中更新这些电机参数配置目标模型的面板。
极对数
频率[Hz]
基本转速[RPM]
控制算法的数据类型
逆变使能逻辑(只适用于mcb_open_loop_control_f28379d目标模型)
5.加载一个示例程序到LAUNCHXL-F28379D的CPU2中,例如,一个使用GPIO31 (c28379D_cpu2_blink.slx)操作CPU2蓝色LED的程序,以确保CPU2不会被错误地配置为使用用于CPU1的单板外设。
6.点击构建、部署和启动在硬件选项卡将目标模型部署到硬件。
注意:通过单击Always Ignore按钮,忽略模型顾问显示的警告消息“配置参数对话框的诊断页面中的多任务数据存储选项为none”。这是预期工作流程的一部分。
7.单击主机模式在目标模型中使用超链接打开关联的主机模型。您还可以使用open_system命令打开主机模型。以F28069M控制器为例:
open_system (“mcb_open_loop_control_host_model.slx”);

主机与目标机型的串口通信请参见Host-Target沟通.
9.选择一个目标(或者TI F28069M,TI F28379D,或其他)在目标选择主机型号的面积。
注意:如果您选择其他,您可以进入波特率为您正在使用的目标硬件,在主机串行设置块参数对话框。
8.2 .在主机型号的“主机串行设置”块参数对话框中,选择a端口名称.
10.在主机模型中输入参考速度值。
11.点击运行在模拟TAB来运行主机模型。
12.将起动/停止电机开关位置改为On,开始运行电机。
13.电机运行后,观察ADC计数 而且
而且 时间范围内的电流。
时间范围内的电流。
注意:这个例子可能不允许电机满负荷运行。开始以小速度运行电机。此外,建议以小步骤改变参考转速(例如,对于基本转速为3000转/分的电机,以500转/分开始运行电机,然后以200转/分的步骤增加或减少转速)。
如果电机不运行,将启动/停止电机开关的位置更改为关闭,以停止电机并更改主机型号中的参考速度。然后,将启动/停止电机开关的位置更改为On,重新运行电机。
生成代码并运行模型来校准ADC偏移
1.对目标模型进行仿真,观察仿真结果。
2.完成硬件连接。
3.从硬件板端子上断开三相电机接线。
4.打开要使用的硬件配置的目标模型。如果要更改目标型号的默认硬件配置设置,请参见型号配置参数.
5.将示例程序加载到LAUNCHXL-F28379D的CPU2中(例如,使用GPIO31操作CPU2蓝色LED的程序),以确保CPU2不会被错误地配置为使用用于CPU1的板外设。
6.点击构建、部署和启动在硬件选项卡将目标模型部署到硬件。
注意:通过单击Always Ignore按钮,忽略模型顾问显示的警告消息“配置参数对话框的诊断页面中的多任务数据存储选项为none”。这是预期工作流程的一部分。
7.单击主机模式在目标模型中使用超链接打开关联的主机模型。
8.2 .在主机型号的“主机串行设置”块参数对话框中,选择a端口名称.
9.点击运行在模拟TAB来运行主机模型。
10.观察ADC计数而且时间范围内的电流。ADC计数的平均值是电流的ADC偏移校正而且.要获得ADC计数的平均值(中值):
在范围窗口,导航到工具>测量并选择信号的统计数据显示跟踪选择而且信号的统计数据区域。
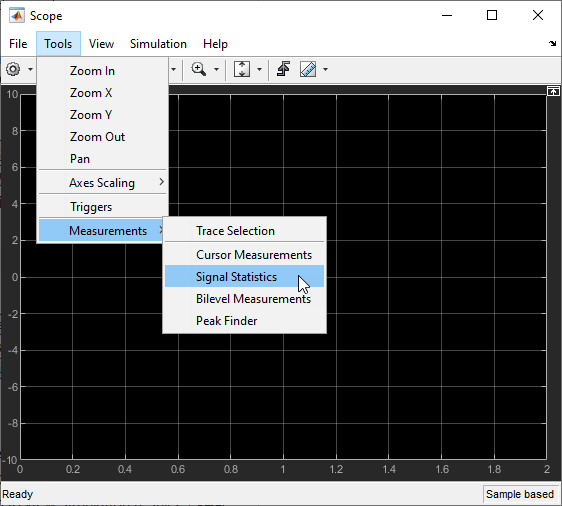
下跟踪选择,选择一个信号(
 或
或 ).所选信号的特征显示在信号的统计数据窗格。您可以在median字段中看到所选信号的中值。
).所选信号的特征显示在信号的统计数据窗格。您可以在median字段中看到所选信号的中值。

中的计算出的ADC(或电流)偏移值逆变器。CtSensAOffset而且逆变器。CtSensBOffset模型初始化脚本中的变量链接到示例。有关说明,请参见从电机参数估计控制增益.
注意:计算的ADC偏移量取决于ADC增益值逆变器。SPI_Gain_Setting您在模型初始化脚本中配置的。改变ADC增益也会改变ADC偏移量。
您也可以从以下列表中选择一个网站: