主要内容
表演
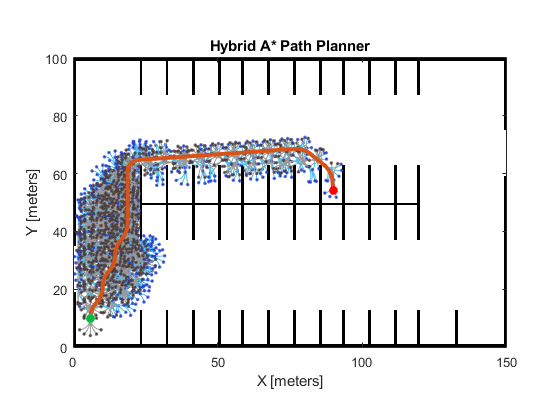
可视化计划的路径
描述
例子
使用混合动力的无障碍路径规划
通过使用Hybrid A *算法将车辆的无碰撞路径进行防撞路径。
创建并将映射创建并分配到状态验证程序
在停车场的车辆肋架中加载细胞的成本值。
加载Spainlotcostval.mat.%costval.
创建一个binaryoccupancymap.具有成本价值。
地图= Binaryoccupancap(Costval);
创建一个用于碰撞检查的状态验证器对象。
Validator = Validatoroccupancymap;
将映射分配给状态Validator对象。
validator.map = map;
计划和可视化路径
初始化Plannerhybridastar.具有状态验证器对象的对象。指定MinturningRadius.和MotionPrimitiveLength.计划者的财产。
Planner = Plannerhybridastar(验证器,'minturningradius',4,'motionPrimitiveLength'6);
定义车辆的开始和目标姿势[x,y,theta] vectors。X和y指定米的位置,和θ.指定弧度中的方向角度。
血统= [6 10 pi / 2];%[米,米,弧度]守门= [90 54-pi / 2];
计划从开始构成到目标姿势的路径。
Refpath =计划(规划师,血统,守缩小);
使用Show函数可视化路径。
展示(规划师)
输入参数
输出参数
在R2019B中介绍
您还可以从以下列表中选择一个网站: