referencePathFrenet
平滑的参考路径适合路径点
描述
的referencePathFrenet对象拟合一个平滑的、分段的、连续的曲线到一组路径点(x, y)或[x y theta].拟合后,沿曲线的点,路径点表示为[x y theta kappa dkappa s],地点:
xy而且θ- SE(2)状态表示为全局坐标,用x而且y单位是米和θ在弧度卡巴曲率,或半径的倒数,单位为米dkappa-曲率对弧长的导数,单位为米/秒年代-弧长,或沿路径从路径原点的距离,单位为米

使用该对象,可以在全局坐标系和Frenet坐标系之间转换轨迹,根据弧长沿路径插值状态,并查询路径上距离全局状态最近的点。
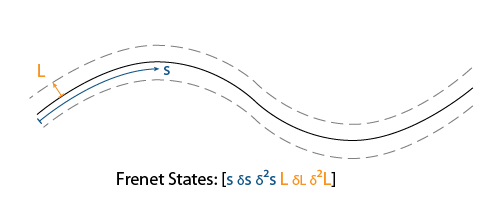
对象将弗莱内状态表达为形式向量[S dS ddS L dL ddL],在那里年代弧长和l是与参考路径方向的垂直偏差。衍生品的年代都是相对于时间的。衍生品的l都相对于弧长,年代.
创建
语法
描述
refPathObj =参考epathfrenet (将一组连续的分段曲线拟合到指定的路径点。的路点)路点参数设置路点财产。
refPathObj =参考epathfrenet (使用插值路径点之间的指定距离将分段连续曲线集拟合到路径点。的路点、“DiscretizationDistance”discretionDist)discretionDist参数设置DiscretizationDistance财产。
属性
对象的功能
closestPoint |
在参考路径上找到最接近全局点的点 |
frenet2global |
将Frenet状态转换为全局状态 |
global2frenet |
将全局状态转换为Frenet状态 |
插入 |
插值参考路径在提供的弧长 |
显示 |
在图中显示参考路径 |
例子
为参考路径生成可选轨迹
使用弗莱内坐标为参考路径生成可选轨迹。为你的轨迹指定不同的初始和最终状态。根据生成的轨迹调整状态。
从一组路径点生成一个参考路径。创建一个trajectoryGeneratorFrenet对象从引用路径返回。
路点= [0 0;...50 20;...100 0;...150 10];refPath = referencePathFrenet(路径点);connector = trajectoryGeneratorFrenet(refPath);
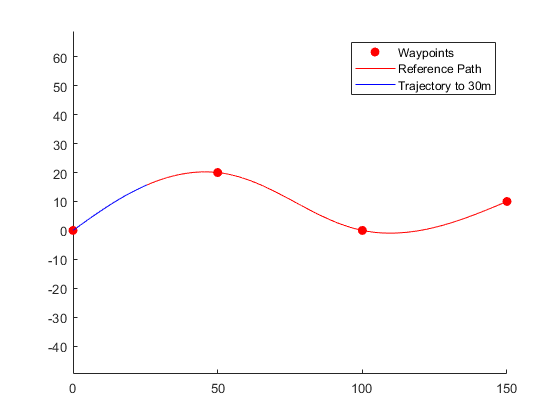
生成一个5秒的轨迹,在路径原点和路径下30米的点之间。
initState = [0 0 0 0 0 0];% [S ds ddS L dL ddL]termState = [30 0 0 0 0 0 0];% [S ds ddS L dL ddL][~,trajGlobal] = connect(connector,initState,termState,5);
在全局坐标中显示轨迹。
显示(refPath);持有在轴平等的情节(trajGlobal.Trajectory (: 1) trajGlobal.Trajectory (:, 2),“b”)传说([“锚点”,“参考路径”,“弹道高度30米”])
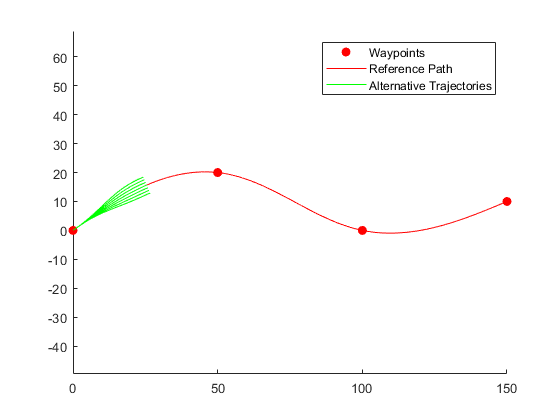
创建横向偏差在-3米到3米之间的终端状态矩阵。生成轨迹,在10秒内覆盖相同的弧长,但横向偏离参考路径。显示新的替代路径。
termStateDeviated = termState + ([-3:3]' * [0 0 0 0 1 0 0]);[~,trajGlobal] = connect(connector,initState,termStateDeviated,5);clf显示(refPath);持有在轴平等的为i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),‘g’)结束传奇([“锚点”,“参考路径”,“另类轨迹”)举行从
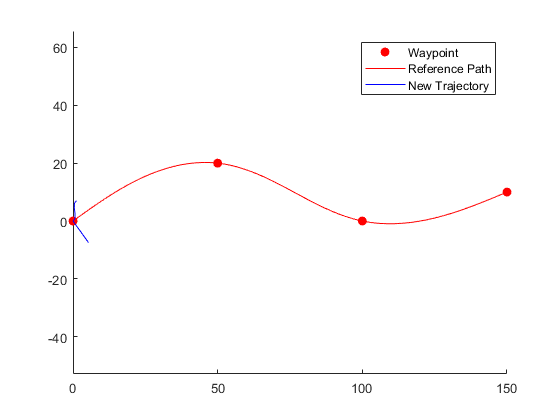
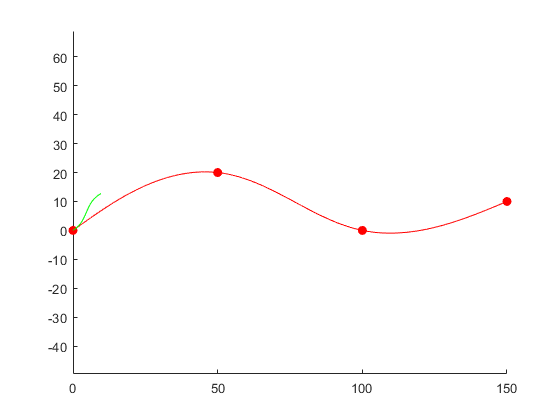
指定一个新的终端状态来生成一个新的轨迹。这种轨迹是不可取的,因为它需要反向运动才能达到10米/秒的横向速度。
newTermState = [5 10 0 5 0 0];[~,newTrajGlobal] = connect(connector,initState,newTermState,3);clf显示(refPath);持有在轴平等的情节(newTrajGlobal.Trajectory (: 1) newTrajGlobal.Trajectory (:, 2),“b”);传奇([“路标”,“参考路径”,“新轨迹”)举行从
通过指定的弧长来放宽对纵向状态的限制南.再次生成并显示轨迹。新位置显示出偏离参考路径的良好替代轨迹。
relaxedTermState = [NaN 10 0 5 0 0];[~, trajglobalrelaxstate] = connect(connector,initState,relaxedTermState,3);clf显示(refPath);持有在轴平等的情节(trajGlobalRelaxed.Trajectory (: 1) trajGlobalRelaxed.Trajectory (:, 2),‘g’);持有从
扩展功能
另请参阅
对象
功能
您也可以从以下列表中选择一个网站: