主要内容
stateSpaceSE3
(3)状态空间
描述
的stateSpaceSE3对象将参数和状态存储在SE(3)状态空间中,该状态空间由状态向量组成,表示为[x,y,z,qw,qx、,qy,求出].x,y,z笛卡尔坐标。qw,qx、,qy,求出表示四元数的方向。该对象使用欧几里得距离计算和线性插值的状态的平移分量。该对象使用四元数距离计算和球面线性插值的旋转分量的状态。
创建
描述
空间= stateSpaceSE3
空间= stateSpaceSE3 (界限)界限设置StateBounds财产。
属性
对象的功能
复制 |
创建状态空间对象的深度拷贝 |
距离 |
两态距离 |
enforceStateBounds |
减少州到州的边界 |
插入 |
国家之间插入 |
sampleUniform |
样本状态使用均匀分布 |
例子
通过三维占用地图环境验证路径
创建3-D占用地图和相关的状态验证器。计划,验证,并可视化通过占用地图的路径。
加载和分配映射到状态验证器
将一个城市街区的三维占用地图加载到工作区中。指定一个阈值,使单元格被认为是无障碍的。
mapData =负载(“dMapCityBlock.mat”);omap = mapData.omap;的核心。FreeThreshold = 0.5;
将占用地图充气,在障碍物周围增加一个安全操作的缓冲区。
充气(omap 5)
创建一个带有状态变量边界的SE(3)状态空间对象。
ss = stateSpaceSE3([-20 220;-20 220;-10 100;正正;正正;正正;正正]);
使用创建的状态空间创建一个3-D占用地图状态验证器。
sv = validatorOccupancyMap3D (ss);
将占用映射分配给状态验证器对象。指定采样距离间隔。
sv。地图= omap;sv。ValidationDistance = 0.1;
规划和可视化路径
创建一个增加最大连接距离的路径规划器。减少最大的迭代次数。
规划师= plannerRRT (ss、sv);计划。MaxConnectionDistance = 50;计划。MaxIterations = 1000;
创建用户定义的评估函数,以确定路径是否达到目标。指定抽样过程中选择目标状态的概率。
计划。GoalReachedFcn = @ ~, x, y)(规范(x - y (1:3)) (1:3) < 5);计划。GoalBias = 0.1;
设定开始和目标状态。
起始= [40 180 25 0.7 0.2 0 0.1];目标= [150 33 35 0.3 0 0.1 0.6];
使用指定的开始、目标和计划来规划路径。
[pthObj, solnInfo] =计划(计划,开始,目标);
检查路径上的点是否处于有效状态。
pthObj.States isValid = isStateValid (sv)
isValid =6 x1逻辑阵列1 1 1 1 1
检查每个顺序路径状态之间的运动是否有效。
isPathValid = 0(大小(pthObj.States 1) 1, 1,“逻辑”);为i = 1:size(pthob . states,1)-1 [isPathValid(i),~] = isMotionValid(sv, pthob . states (i,:),),...: pthObj.States (i + 1));结束isPathValid
isPathValid =5 x1逻辑阵列1 1 1 1
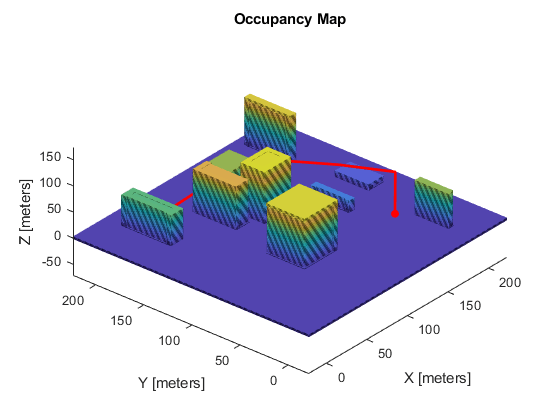
可视化结果。
显示(omap)在scatter3(开始(1,1),开始(1、2),开始(1、3)‘g’,“填充”)%提取启动状态scatter3(目标(1,1)、目标(1、2)、目标(1、3)“r”,“填充”)%平局目标状态plot3 (pthObj.States (: 1) pthObj.States (:, 2), pthObj.States (:, 3),...的r -,“线宽”, 2)%画出路径
扩展功能
介绍了R2020b
你也可以从以下列表中选择一个网站: