IMU、GPS和INS/GPS型号
导航工具箱™ 使您能够为惯性测量单元(IMU)、全球定位系统(GPS)和惯性导航系统(INS)建模。您可以通过将模型的属性设置为硬件数据表中的值来为特定硬件建模。您可以调整环境和噪声属性以模拟真实环境。您可以使用这些模型来测试和验证融合算法,或者在开发更大的应用程序时将其用作占位符。
本教程概述导航工具箱中的惯性传感器和GPS模型。

要了解如何生成驱动传感器模型的地面真实运动,请参见航路点轨迹和运动学.
惯性测量装置
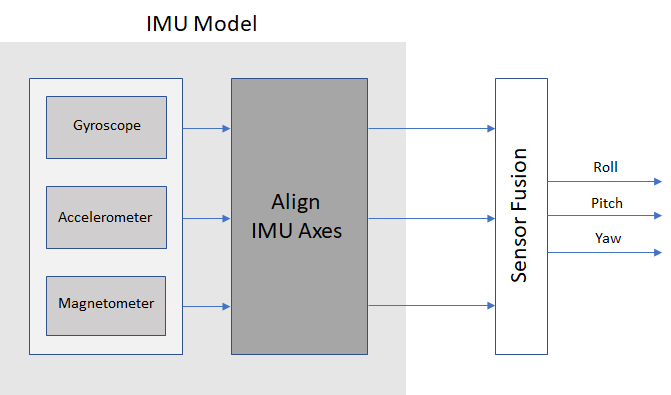
IMU是安装在平台上的电子设备。IMU由报告平台运动各种信息的单个传感器组成。IMU组合了多个传感器,包括加速度计、陀螺仪和磁强计。

使用此工具箱,从IMU模型返回的测量使用以下单位和坐标约定。
| 输出 | 描述 | 单位 | 坐标系 |
|---|---|---|---|
| 加快 | 电流加速计读数 | 米/秒2. | 传感器体 |
| 角速度 | 电流陀螺仪读数 | 拉德/秒 | 传感器体 |
| 磁场 | 电流磁强计读数 | μT | 传感器体 |
通常,IMU返回的数据被融合在一起,并解释为平台的滚动、俯仰和偏航。现实世界中的IMU传感器可以为每个传感器具有不同的轴。导航工具箱提供的模型假设各个传感器轴对齐。
要创建IMU传感器模型,请使用免疫传感器系统对象™.
IMU=IMU传感器
IMU=具有以下属性的IMU传感器:IMUType:“加速度陀螺仪”采样器:100温度:25加速计:[1×1加速度参数]陀螺仪:[1×1陀螺仪参数]随机流:“全局流”
默认IMU模型包含一个理想的加速计和一个理想的陀螺仪。这个加速度参数和回转参数对象定义加速计和陀螺仪配置。可以设置这些对象的属性以模拟特定的硬件和环境。有关IMU参数对象的详细信息,请参见加速度参数,回转参数和磁参数.
要建模接收IMU传感器数据,请使用平台的地面真实加速度和角速度调用IMU模型:
真实加速度=[1 0];真实角速度=[1 0];[accelerometerReadings,陀螺仪读数]=IMU(真实加速度,真实角速度)
加速度计读数=-1.0000 0 9.8100陀螺仪读数=1 0 0
全球定位系统
全球定位系统(GPS)为地球表面的平台(接收器)提供三维位置信息。
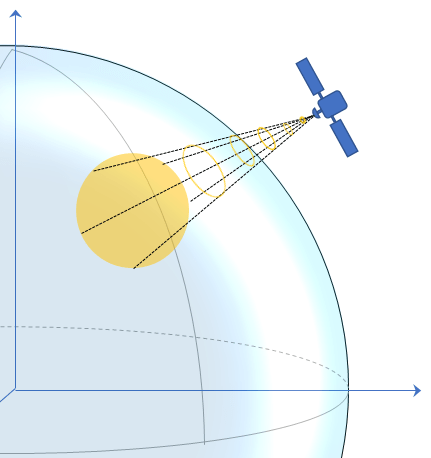
全球定位系统(GPS)由一组连续环绕地球运行的卫星组成。卫星保持这样的配置,即平台始终在至少四颗卫星的视野内。通过测量从卫星到平台的信号的飞行时间,可以对平台的位置进行三边测量。卫星给广播信号加时间戳,在接收时与平台时钟进行比较。需要三颗卫星对三维位置进行三边测量。第四颗卫星需要纠正平台和卫星之间的时钟同步错误。

导航工具箱提供的GPS模拟对平台(接收器)数据进行建模,这些数据已被处理并解释为高度、纬度、经度、速度、地面速度和航向。
从GPS模型返回的测量值使用以下单位和坐标约定。
| 输出 | 描述 | 单位 | 坐标系 |
|---|---|---|---|
| 拉拉 | 基于WGS84椭球地球模型的大地坐标当前全球位置读数 | 度(纬度)、度(经度)、米(高度) | 拉拉 |
| 速度 | 从GPS读取当前速度 | 米/秒 | 本地内德 |
| 地面速度 | 从GPS读取当前地面速度 | 米/秒 | 本地内德 |
| 课程 | 从GPS读取当前航向 | 度 | 本地内德 |
GPS模型使您能够设置高精度和噪声参数,以及接收器更新率和参考位置。
要创建GPS模型,请使用GPS传感器系统对象。
GPS=GPS传感器
GPS=GPS传感器,具有以下属性:更新速率:1 Hz参考位置:[0 0][deg deg m]水平位置精度:1.6 m垂直位置精度:3 m速度精度:0.1 m/s随机流:“全局流”衰减因子:0.999
要对接收GPS传感器数据的模型进行建模,请使用平台的地面真实位置和速度调用GPS模型:
truePosition=[1 0];trueVelocity=[1 0];[LLA,速度,地面速度,航向]=GPS(真位置,真速度)
LLA=0.0000 0.0000 0.3031速度=1.0919-0.0008-0.1308地面速度=1.0919航向=359.9566
惯性导航系统和全球定位系统
惯性导航系统(INS)使用类似IMU上的惯性传感器:加速度计、陀螺仪和磁强计。惯性导航系统融合惯性传感器数据,以计算平台的位置、方向和速度。INS/GPS使用GPS数据校正INS。通常,INS和GPS读数与扩展卡尔曼滤波器融合,其中INS读数用于预测步骤,GPS读数用于更新步骤。当GPS信号不可靠时,INS/GPS的一个常见用途是航位推算。
“INS/GPS”是指整个系统,包括滤波。导航工具箱提供的INS/GPS模拟为INS/GPS建模,并根据地面真实运动返回惯性传感器和GPS接收器报告的位置、速度和方向。
从INS/GPS返回的测量使用以下单位和坐标约定。
| 输出 | 描述 | 单位 | 坐标系 |
|---|---|---|---|
| 位置 | 来自INS/GPS的当前位置读数 | 米 | 本地内德 |
| 速度 | 从INS/GPS读取的当前速度 | 米/秒 | 本地内德 |
| 方向 | 来自INS/GPS的当前方向读数 | 四元数或旋转矩阵 | 不适用 |
另见
免疫传感器|GPS传感器|INS传感器|全球导航卫星系统传感器
相关话题
外部网站
您还可以从以下列表中选择网站: