主要内容
createGridWorld
为强化学习创建一个二维网格世界
描述
例子
创建网格世界环境
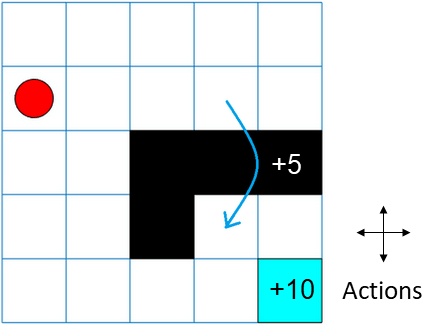
对于这个例子,考虑一个5乘5的网格世界,规则如下:
以边界为界的五乘五网格世界,有4种可能的行动(北=1,南=2,东=3,西=4)。
代理从单元格[2,1](第二行,第一列)开始。
如果agent在单元格[5,5](蓝色)到达终端状态,则得到+10的奖励。
该环境包含一个从细胞[2,4]到细胞[4,4]的特殊跳跃,带有+5奖励。
该试剂被细胞[3,3]、[3,4]、[3,5]和[4,3](黑细胞)中的障碍物阻断。
所有其他行动的结果是-1奖励。
首先,创建一个GridWorld对象使用createGridWorld函数。
GW = createGridWorld (5,5)
GW = GridWorld with properties: GridSize: [5 5] CurrentState: "[1,1]" States: [25x1 string] Actions: [4x1 string] T: [25x25x4 double] R: [25x25x4 double] ObstacleStates: [0x1 string] TerminalStates: [0x1 string]
现在,设置初始、终端和障碍物状态。
GW。现状后='[2,1]';GW。TerminalStates =“[5,5]”; GW.ObstacleStates=["[3,3]";“[3,4]”;“[3,5]”;“[4 3]”];
更新障碍状态的状态转移矩阵,并设置障碍状态的跳跃规则。
updateStateTranstionForObstacles (GW) GW。T (state2idx(吉瓦,"[2,4]")::) = 0;GW。T(年代t一个te2idx(GW,"[2,4]"), state2idx(吉瓦,“(4,4)”):) = 1;
接下来,在奖励转换矩阵中定义奖励。
nS =元素个数(GW.States);nA =元素个数(GW.Actions);GW。R=-1*ones(nS,nS,nA); GW.R(state2idx(GW,"[2,4]"), state2idx(吉瓦,“(4,4)”),:)=5;GW.R(:,状态2Idx(GW,GW.终端状态),:)=10;
现在,使用rlMDPEnv创建网格世界环境使用GridWorld对象吉瓦.
env = rlMDPEnv (GW)
env=rlMDPEnv,属性为:模型:[1x1 rl.env.GridWorld]ResetFcn:[]
控件可以可视化网格世界环境情节函数。
地块(环境)

输入参数
输出参数
介绍了R2019a
您还可以从以下列表中选择网站: