checkCollision
检查两个几何都在碰撞
句法
描述
collisionStatus= checkCollision(geom1,geom2)geom1和geom2。如果两个几何都在碰撞在其指定的姿势,checkCollision等于1。如果没有冲突被发现,collisionStatus等于0。
[也返回每个几何的最小距离和见证点,collisionStatus,sepdist,witnesspts] = checkCollision(geom1,geom2)sepdist和witnesspts分别时,没有碰撞的两个几何之间找到。
例子
检查几何冲突状态
这个例子说明了如何检查两个碰撞几何形状的碰撞状态。
创建一个盒子碰撞几何。
BX = collisionBox(1,2,3);
创建一个圆柱碰撞几何。
Y = collisionCylinder(3,1);
翻译沿汽缸X通过2轴摆动。
T = trvec2tform([2 0 0]);cy.Pose = T;
画出两个几何。
秀(CY)保持上显示(BX)XLIM([ - 5 5])ylim([ - 5 5])zlim([ - 5 5])保持离
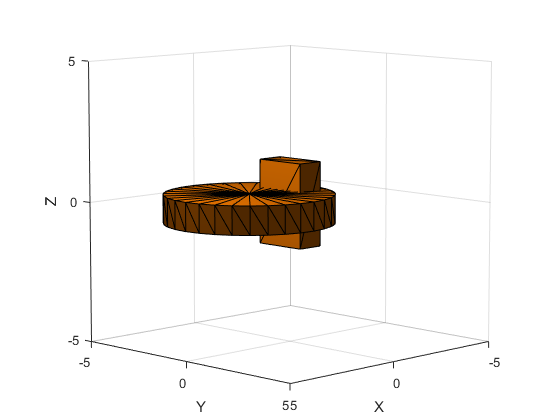
检查碰撞状态。确认状态与剧情相符。
[areIntersecting,DIST,witnessPoints] = checkCollision(BX,CY)
areIntersecting = 1
DIST = NaN的
witnessPoints =3×2楠楠楠楠楠楠
翻译沿箱X由图3和向下 - 轴ž通过4.确认箱和气缸不碰撞轴摆动。
T = trvec2tform([0 3 -4]);bx.Pose = T;[areIntersecting,DIST,witnessPoints] = checkCollision(BX,CY)
areIntersecting = 0
DIST = 2
witnessPoints =3×20.4286 0.4286 2.0000 2.0000 -2.5000 -0.5000
积箱,气缸,和表示两个几何之间的最小距离的线段。
秀(CY)保持上显示(BX)WP = witnessPoints;plot3([WP(1,1)的wp(1,2)],[WP(2,1)的wp(2,2)],[WP(3,1)的wp(3,2)],'BO-')XLIM([ - 5 5])ylim([ - 5 5])zlim([ - 5 5])保持离

输入参数
输出参数
限制
碰撞检测结果不再可靠时的最小距离低于10-5米
扩展功能
介绍了在R2019b
您还可以选择从下面的列表中的网站: