主要内容
利用Simulink三维动画可视化机械手轨迹跟踪万博1manbetx
用Simulink 3D Animation™模拟刚体树机器人模型的关节空间轨迹,并将结果可视化。万博1manbetx
模型概述
用以下命令加载模型:
open_system (“SL3DJointSpaceManipulatorTrajectory”)
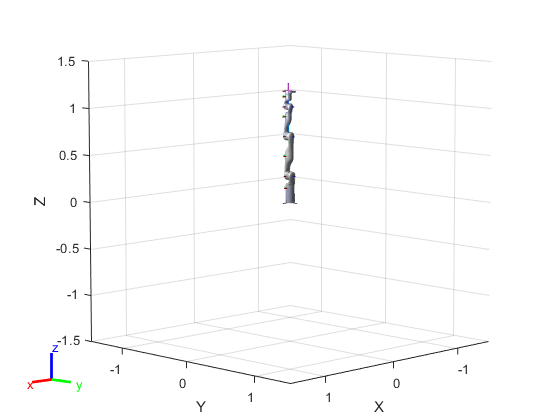
本例使用Kinova Gen3操作器,它存储在模型工作区中。然而,用以下命令加载和可视化机器人:
gen3 = loadrobot (“kinovaGen3”,“DataFormat”,“列”);显示(gen3);
模型分为两部分:
机械手轨迹跟踪
在Simulink 3D动画可视化万博1manbetx™
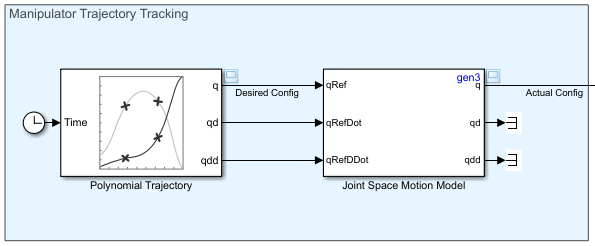
机械手轨迹跟踪
的多项式的轨迹块从范围内的随机路径点集生成连续的关节空间轨迹(-0.375 * 0.375π*π),在每个路标点停下。的关节空间运动模型以Kinova Gen3机械臂为例,在计算力矩控制下,对这些轨迹的闭环跟踪进行了仿真。
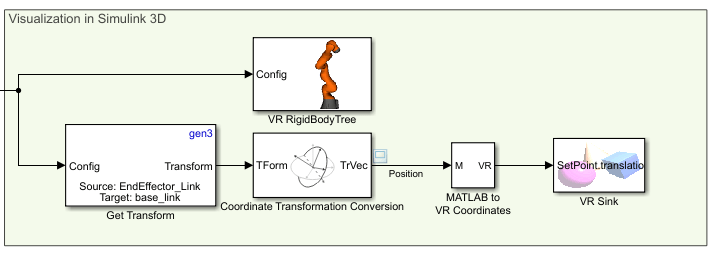
在Simulink 3D动画可视化万博1manbetx™
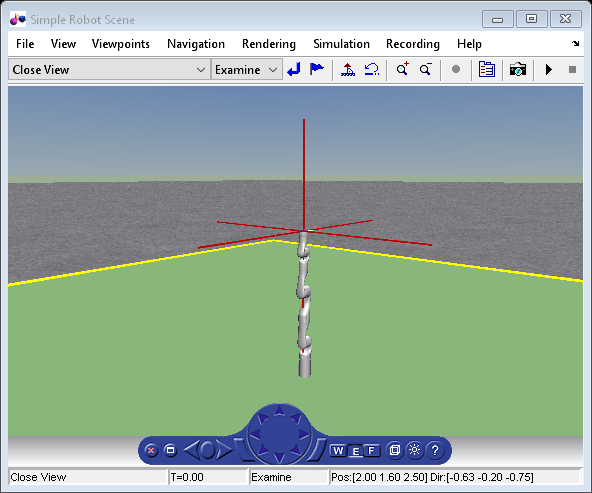
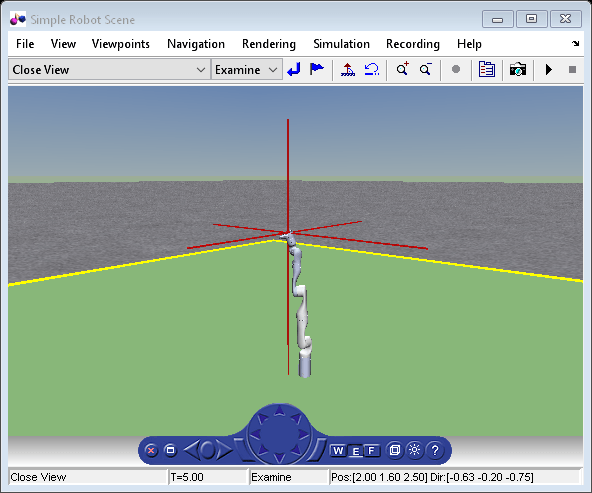
的VR RigidBodyTree块将机械手插入到由相关的世界文件定义的场景中,robot_scene.wrl.的VR水槽块提供了一个可视化的世界。在块参数中VR水槽块已被修改,以将输出中的红色轴指示的设定值作为输入。的得到改变块用于获取末端执行器的位置,然后将其从一个均匀的随机变换矩阵转换为一个平移向量,再从MATLAB转换为VR坐标。
模拟模型
sim卡(“SL3DJointSpaceManipulatorTrajectory.slx”);
在模型中,节奏是活跃的,如运行按钮下面的时钟符号所示:

这确保了模型被放慢到接近实时的速度,以便可视化可以以现实的速度更新。
轨迹可视化
默认情况下,模型同时打开VR可视化和显示速度和位置信息的范围。但是,如果它们是关闭的,则可以通过单击VR水槽块,并且可以通过双击相关的查看器图标来打开作用域:

范围显示跟踪结果的关节空间运动模型块。如下图的左边所示,机器人的初始配置与参考轨迹不同,但受控运动保证了在仿真过程中到达并跟踪轨迹。最后的示波器显示末端执行器在世界框架中的X, Y和Z位置。



你也可以从以下列表中选择一个网站: