控制系统设计优化方法
使用控制系统设计,您可以使用各种图形化和自动调优方法来调优补偿器。
图形化的优化方法
使用图形调优方法交互式地添加、修改和删除控制器极点、零点和增益。
| 调优方法 | 描述 | 有用的 |
|---|---|---|
| 博德编辑器 | 调整补偿器以实现特定的开环频率响应(环路整形)。 | 调整开环带宽,设计增益和相位裕度。 |
| 闭环预示编辑器 | 调整预过滤器以改进闭环系统响应。 | 改善参考跟踪,输入干扰抑制和噪声抑制。 |
| 根轨迹编辑器 | 调整您的补偿器,以生产闭环极点位置,满足您的设计规范。 | 按照时域设计规范进行设计,如最大超调和调整时间。 |
| 尼科尔斯编辑器 | 调整补偿器以实现特定的开环响应(环路整形),结合尼科尔斯图上的增益和相位信息。 | 调整开环带宽,设计增益和相位裕度。 |
当使用图形化的调整,你可以直接从编辑地块或使用补偿编辑器修改补偿。通用的设计方法是大致调整使用编辑器地块的补偿,然后使用补偿编辑器来微调补偿参数。欲了解更多信息,请参阅编辑动态补偿器(控制系统工具箱)
图形调谐方法不是相互排斥的。例如,你可以同时使用伯德编辑器和根轨迹编辑同时调整你的补偿。设计既时域和频域特性时,此选项很有用。
有关图形化调优的示例,请参阅以下内容:
自动调优方法
使用自动调优方法根据您的设计规范自动调整补偿器。
| 调优方法 | 描述 | 要求和限制 |
|---|---|---|
| PID调优 | 自动地调谐PID增益以平衡性能,并使用传统的PID调谐式鲁棒性或调控制器。 |
经典的PID整定公式需要一个稳定或积分有效的对象。 |
| 基于优化的调优 | 使用图形调优和分析图中指定的设计要求优化补偿器参数。 |
需要万博1manbetx®优化设计™软件 调整先前定义的控制器结构的参数。 |
| LQG合成 | 设计一个全阶稳定反馈控制器作为线性二次高斯(LQG)跟踪器。 |
最大的控制器顺序取决于有效的植物动力学。 |
| 环成形 | 找到具有指定开环带宽或形状的全阶稳定反馈控制器。 |
需要健壮的控制工具箱™软件。 最大的控制器顺序取决于有效的植物动力学。 |
| 内部模型控制(IMC)调优 | 利用IMC设计方法得到了一个全阶稳定反馈控制器。 |
假设您的控制系统使用一个IMC架构,其中包含您的工厂动态的预测模型。 最大的控制器顺序取决于有效的植物动力学。 |
一种常用的设计方法是使用PID整定、LQG合成、环路整形或IMC整定来生成初始补偿器。然后,可以使用基于优化的调优或图形调优来改进补偿器性能。
有关自动调优方法的更多信息,请参见使用自动调优方法设计补偿器(控制系统工具箱)。
有效调谐装置
一个有效的植物是包含在模型中比你调整补偿器等开环的所有元素的补偿器控制系统。下图显示有效植物的实例:

知道了有效的植物你见过补偿的特性可以帮助您了解哪些调整方法为您的系统工作。例如,一些自动调节方法仅适用于补偿其开环( )有稳定的有效植物( )。此外,对于调整方法,如IMC和环路成型,最大的控制器的顺序取决于动态的有效工厂。
调优补偿器万博1manbetx
如果您的Simulink模型的补偿器具有其极,零,或增万博1manbetx益限制,不能使用LQG合成,回路成形,或IMC调整。例如,您可以在不调整参数PID控制器块使用这些方法。如果应用程序需要控制器约束,请使用另一种自动或图形调优方法。
同样,Simulink模型中的任何补偿器约束都限制了调优补偿器的结构。万博1manbetx例如,如果您正在使用PID调优并配置您的PID控制器块作为PI控制器,你的调谐补偿器必须有一个零导数参数。
选择调优方法
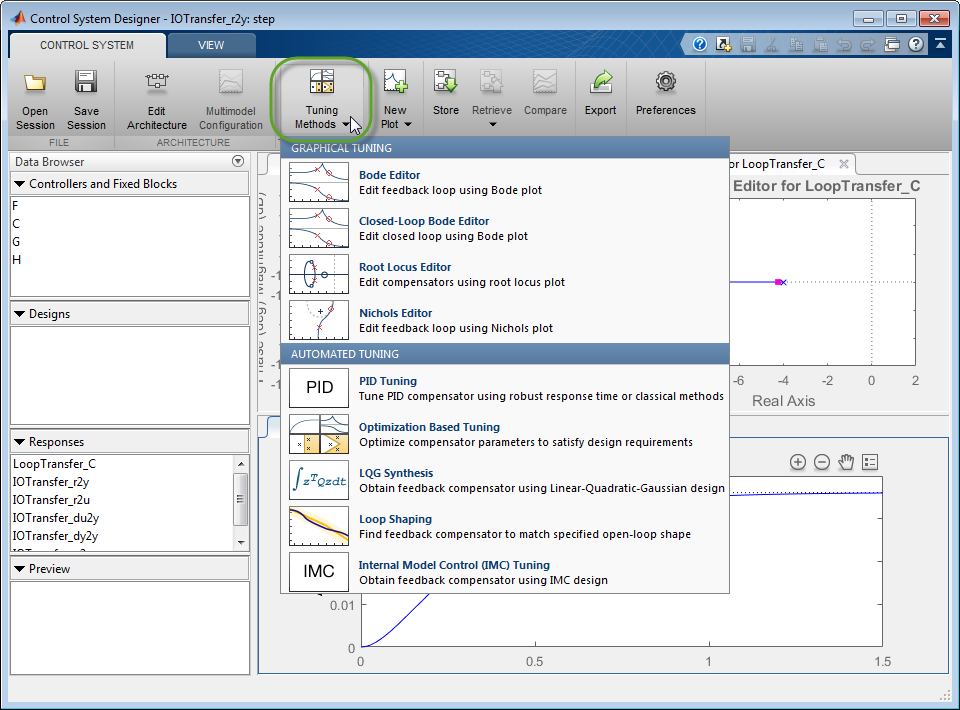
要选择调优方法,请输入控制系统设计,点击调整方法。
另请参阅
相关话题
- 波德图设计(控制系统工具箱)
- 根轨迹设计(控制系统工具箱)
- 尼科尔斯图设计(控制系统工具箱)
- 使用自动调优方法设计补偿器(控制系统工具箱)
您还可以选择从下面的列表中的网站: