根轨迹设计
根轨迹设计在其中编辑补偿增益,电线杆,并在根轨迹图零的集中控制系统设计技术。
当开环增益,k,当控制系统在连续范围内变化时,根轨迹图显示反馈系统闭环极点的轨迹。例如,在以下跟踪系统中:
P(年代)是植物,H(年代)是传感器动力学,和k是可调节的标量增益的闭环极点的根
根轨迹技术包括在复杂平面上绘制闭环极点轨迹k变化。您可以使用此图来识别与闭环极点的期望的设定相关的增益值。
使用根轨迹图形调谐电液伺服机构
此示例示出了如何设计用于使用根轨迹图形调谐技术的电动液压伺服机构的补偿器。
工厂模式
一个简单版本的电液伺服机构模型组成
推挽放大器(一对电磁铁的)
在高压液压流体的容器的滑动阀芯
阀门在容器中打开以允许流体流动
具有活塞驱动的柱塞的中央腔室以提供力到负载
对称的流体回流容器

在卷轴上的力是正比于在电磁铁线圈的电流。当阀芯移动时,阀打开,允许高压液压流体流过该腔室中流动。移动流体迫使活塞在阀柱的相反方向移动。有关此模型的更多信息,包括线性模型的推导,见[1]。
您可以使用电磁铁的输入电压来控制ram的位置。当ram位置的测量可用时,您可以为ram位置控制使用反馈,如下所示,其中Gservo代表伺服机构:

设计要求
在这个例子中,调整补偿器,C(年代),以满足下面的闭环阶跃响应的要求:
2%的沉淀时间小于0.05秒。
最大超调小于5%。
开放式控制系统设计
在MATLAB®命令行,加载一个线性化的伺服机构模型,并打开控制系统设计在根轨迹编辑配置。
负载ltiexamplesGservocontrolSystemDesigner (“rlocus”,Gservo);
应用程序打开并导入Gservo作为默认控制架构的工厂模型,配置1。
在控制系统设计, 一个根轨迹编辑器情节和输入-输出阶跃响应打开。
同时查看开环频率响应和闭环阶跃响应的观点选项卡上,单击左右。

这个应用程序显示博德编辑器和阶跃响应阴谋并排。

在闭环阶跃响应曲线图中,上升时间大约为两秒,不满足设计要求。
为了使根轨迹图更易于阅读,可以放大。在根轨迹编辑器,右键单击plot区域并选择属性。
在属性编辑器对话框中,对范围选项卡中,指定实轴和虚轴限制从-500来500。
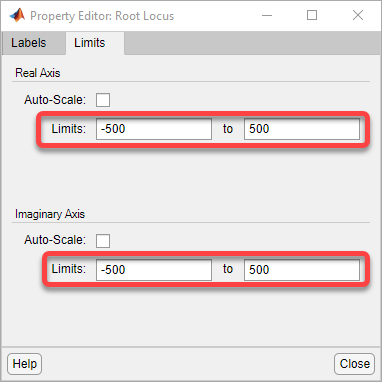
点击关闭。
增加补偿器增益
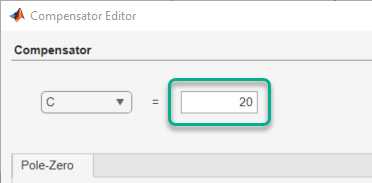
为了产生更快的响应,增加补偿器的增益。在根轨迹编辑器,右键单击plot区域并选择编辑补偿。
在“补偿器编辑器”对话框中,指定增益为20.。
在根轨迹编辑器图中,闭环极点位置的移动反映了新的增益值。此外,阶跃响应图更新。
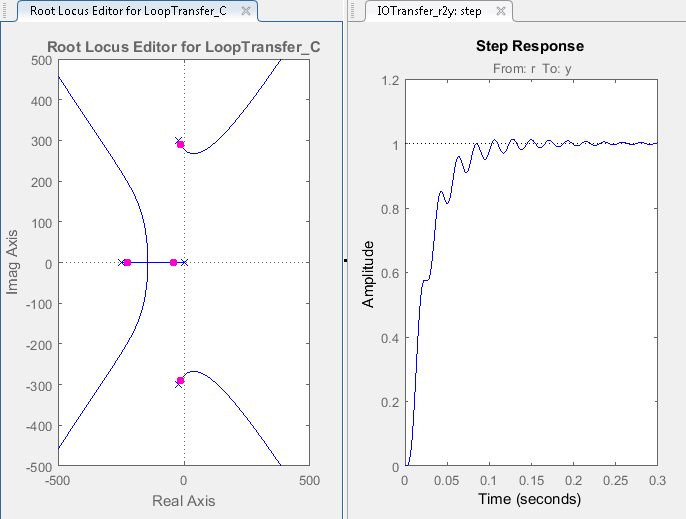
闭环响应不满足解决时间的要求和显示不必要的振铃。
增加增益使欠阻尼系统,并进一步增加导致不稳定。因此,在满足设计要求,必须指定额外补偿力度。有关添加和编辑补偿力度的更多信息,请参阅编辑动态补偿器。
添加波兰人补偿
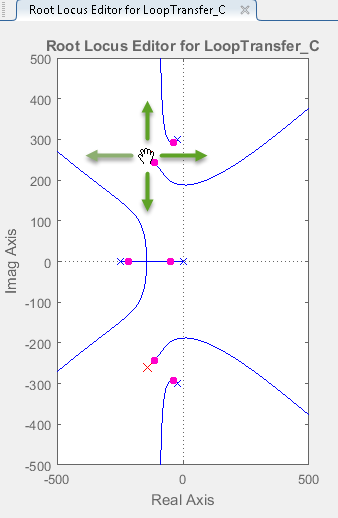
在补偿器中增加一个复杂的磁极对根轨迹编辑器,右键单击plot区域并选择添加极/零>复杂的杆。单击要添加一个复杂极点的绘图区域。
应用程序将复杂的极点对添加到根轨迹图的红色X的,并更新步骤响应曲线。
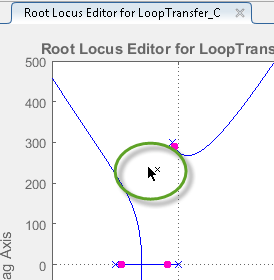
在根轨迹编辑器,将新杆拖到附近的位置-140±260我。当你拖动一杆时,另一杆自动更新。
提示
当你拖动一个极点或零点,应用程序会显示在状态栏的新值,在右侧。

添加零来补偿
要向补偿器添加复杂零对,请在补偿器编辑器对话框中右键单击动力学表,并选择添加极/零>复杂的零

该应用程序增加了一个在一对复零点的1±我你的补偿器
在动力学表,单击复杂的零行。然后在编辑选定的动力学部分中,指定一个实部的-170和一个虚部的430。

补偿器和响应图自动更新,以反映新的零位置。

在阶跃响应图中,沉降时间为0.1秒左右,不满足设计要求。
调整极点和零点的位置
补偿器的设计过程可以包括一些试验和错误。直到满足设计要求,调整补偿增益,极点位置,和零点的位置。
满足设计要求的一种可能的补偿器设计是:
的补偿增益
10复杂的波兰人-110±140我
复杂的零-70±270我
在“补偿器编辑器”对话框中,使用以下值配置补偿器。在阶跃响应图中,沉降时间约为0.05秒。

验证确切的建立时间,用鼠标右键单击阶跃响应地块面积及选择特点>建立时间。在响应图上出现了一个沉降时间指示器。
若要查看调整时间,请将光标移到调整时间指示器上。
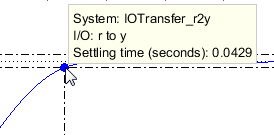
沉降时间约为0.043秒,满足设计要求。
参考
[1]克拉克,R.N。控制系统动力学张德亮,北京大学出版社,1996。
另请参阅
相关话题
您还可以选择从下面的列表中的网站:
