曲调Gain-Scheduled控制器使用闭环PID自动调谐块
这个例子展示了如何使用闭环PID自动调谐块调整gain-scheduled控制器在一个模拟。
水箱系统模型
这个例子使用一个gain-scheduled控制器非线性水箱的水位控制系统。水箱系统工厂最初由一个比例积分控制器的控制watertank万博1manbetx仿真软件®模型。更多细节的非线性水箱系统,明白了watertank仿万博1manbetx真软件模型。

以下部分描述如何修改watertank模型优化和验证gain-scheduled控制器。另外,使用watertank_gainscheduledcontrol模型提供了这个例子。
用植物和控制器连接闭环PID自动调谐的块
插入闭环PID控制器和植物之间的自动调谐块如下列图所示。的启动/停止启动和停止信号闭环实验。当没有运行实验,闭环PID自动调谐块像一个单位增益的块,的地方u信号直接传递u +Δu。

连接块存储优化收益
创建一个时间表,在每个操作点自动调谐的收益记录。在这个例子中,触发子系统是用来写参考高度和控制器收益下降边缘自动调谐的工作区启动/停止信号。模拟该模型产生的数组调整收益和断点,以便于使用动态查找表来测试控制器。


验证Gain-Scheduled控制器的性能
后获得一个设置的断点和调优,测试调优gain-scheduled与水箱系统控制器。为此,删除自动调谐块,改变PID控制器块的外部来源,并插入动态查找表块,如图表所示。

集成优化和测试模型的例子
在这个例子中,gain-scheduled控制器调整使用闭环PID自动调谐块及其性能测试在同一模型。这个示例模型使用一个变体子系统组织优化和测试工作流程。


调优和测试模式之间进行切换,双击子系统块变体。

在单一操作点优化控制器
多个操作点调优gain-scheduled控制器之前,在单一操作点帮助你优化配置闭环PID自动调谐块。打开示例模型watertank_gainscheduledcontrol与控制器所使用的收益watertank万博1manbetx仿真软件模型。
mdl =“watertank_gainscheduledcontrol”;Kp = 1.599340;Ki = 0.079967;open_system (mdl);(mdl set_param (,“/变体子系统”),“SimMode”,“优化”);
配置闭环PID自动调谐块
在连接与水箱系统闭环PID自动调谐块模型和植物PID控制器块,使用块参数来指定优化和实验设置。下面的例子使用了相同的例子中发现的设计要求设计补偿器使用自动PID优化设计和图形预示。这些设计要求闭环形式的阶跃响应特性。
超调不到5%
上升时间小于5秒
调整PID控制器以满足上述设计要求,闭环PID参数自动调谐块预填充。的调优选项卡有三个主要的优化设置。
目标带宽,决定你想让控制器响应速度。目标带宽大约2 /预期的上升时间。预期的上升时间为4秒,设置目标带宽= 2/4 = 0.5 rad / s。
目标阶段保证金,决定您希望控制器的健壮性。在这个例子中,从60度的默认值。
实验样品时间:样品时间执行的实验自动调谐块。使用推荐的0.02 /带宽样本时间= 0.02/0.5 = 0.04。
的实验选项卡有三个主要的实验设置。
植物类型,指定工厂是否渐近稳定或整合。在这个例子中,水箱系统工厂整合。
植物信号-指定工厂是否有一个积极的还是消极的信号。植物信号是积极的,如果一个积极的改变植物输入标称操作点的结果在一个积极的改变在植物工厂时的输出达到一个新的稳定状态。在这个例子中,水箱系统植物有一个积极的迹象。
正弦振幅-指定注射正弦波的振幅扰动。在这个例子中,指定一个正弦振幅为0.3。
模拟一个营业点
开始实验140秒,确保水位已经达到稳定状态 。推荐的试验持续时间是200秒= 200/0.4 = 500年代/带宽。开始时间为140秒,停止时间是640秒。仿真停止时间进一步增加捕获完整的实验。
(mdl set_param (,' /子系统/优化/闭环PID Autotuner1变体”),“TargetPM”,“60”);(mdl set_param (,“编辑/信号”),“ActiveScenario”,“TuningSignal_OnePoint”);simOut = sim (mdl,“StopTime”,“800”);simOut.Kp_tuned
ans = 1.8257
simOut.Ki_tuned
ans = 0.2037
在watertank万博1manbetx仿真软件模型,初始PI控制器增益Kp = 1.599340和Ki = 0.079967。调优后,控制器增益Kp = 1.82567和Ki = 0.20373。
检查和调整自动调谐参数调优结果
用新的替换控制器增益自动调谐收益和验证设计要求。
Kp = simOut.Kp_tuned;Ki = simOut.Ki_tuned;simOut = sim (mdl,“StopTime”,“100”);图;情节(simOut.ScopeDataGS.time simOut.ScopeDataGS.signals.values);网格在标题(控制器的阶跃响应与60度调整目标阶段保证金的);

StepPerformance_OnePoint = stepinfo (simOut.ScopeDataGS.signals.values (:),…simOut.ScopeDataGS.time (:) 10 1)
StepPerformance_OnePoint =结构体字段:上升时间:3.6251 TransientTime: 22.5219 SettlingTime: 22.5219 SettlingMin: 9.1089 SettlingMax: 10.7821过度:8.6895低于:0峰:9.7821 PeakTime: 9.5500
阶跃响应的上升时间3.6251秒,超过8.6895%。过度大于预期;增加目标阶段保证金75度改善闭环瞬态响应。
(mdl set_param (,' /子系统/优化/闭环PID Autotuner1变体”),“TargetPM”,“75”);
分析仿真结果。系统在实验开始时稳态和稳态优化完成后返回。作为控制器的指示调优性能、闭环PID自动调谐块收敛达到100%水平早于推荐的500秒。因此,减少实验时间为300秒,这意味着停止时间440秒。因此,减少仿真停止时间从800秒到500秒。
Kp = 1.599340;Ki = 0.079967;(mdl set_param (,“编辑/信号”),“ActiveScenario”,“TuningSignal_OnePointAdjusted”);simOut = sim (mdl,“StopTime”,“500”);simOut.Kp_tuned
ans = 1.9351
simOut.Ki_tuned
ans = 0.1141
模拟与实验参数Kp的生产调整收益= 1.93514和Ki = 0.11415。再次检查阶跃响应使用收益调整和增加的边际价值目标阶段。
Kp = simOut.Kp_tuned;Ki = simOut.Ki_tuned;simOut = sim (mdl,“StopTime”,“100”);图;情节(simOut.ScopeDataGS.time simOut.ScopeDataGS.signals.values);网格在标题(与75度控制器的阶跃响应调整目标阶段保证金的);

StepPerformance_OnePointAdjusted = stepinfo (simOut.ScopeDataGS.signals.values (:),…simOut.ScopeDataGS.time (:) 10 1)
StepPerformance_OnePointAdjusted =结构体字段:上升时间:4.1398 TransientTime: 21.4047 SettlingTime: 21.4047 SettlingMin: 9.1044 SettlingMax: 10.2829过度:3.1438低于:0峰:9.2829 PeakTime: 12.1100
阶跃响应的上升时间4.1398秒,超过3.1438%,均满足设计要求。
模拟模型与优化收益多个操作点 = (5、10、15、20)。
(mdl set_param (,“编辑/信号”),“ActiveScenario”,“TuningSignal_SinglePID”);simOut_single = sim (mdl,“StopTime”,“2400”);
曲调Gain-Scheduled控制器在多个操作点
组调整收益产生期望的响应。您现在可以在多个操作点来创建一个执行调优gain-scheduled控制器。
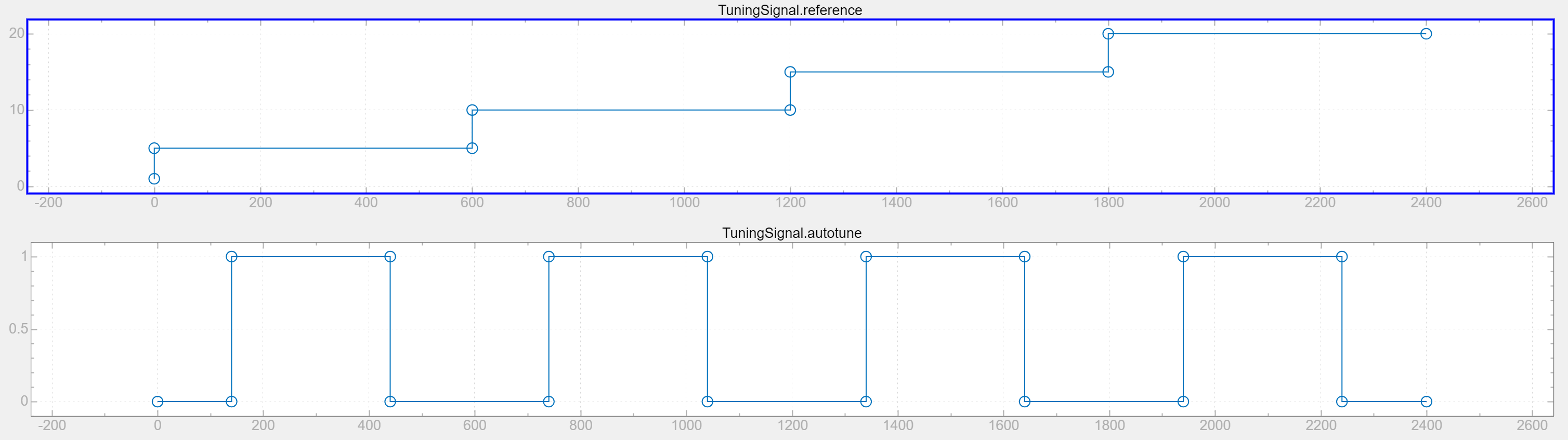
创建输入优化信号
调度变量的操作范围 从1到20了自动调谐的操作点。在这个例子中,gain-scheduled控制器增益调整四个操作点 = (5、10、15、20)。优化多个操作点,使用信号编辑器块创建引用和自动调谐启动/停止信号
模拟多个操作点
使用输入信号,模拟watertank_gainscheduledcontrol模型的整个长度自动调谐过程。在仿真结束时,将调整收益和断点保存为矢量的MATLAB®工作区。
Kp = 1.599340;Ki = 0.079967;(mdl set_param (,“编辑/信号”),“ActiveScenario”,“TuningSignal”);simOut = sim (mdl,“StopTime”,“2400”);Kp_tuned = simOut.Kp_tuned
Kp_tuned =4×11.9283 1.9351 1.9382 1.9400
Ki_tuned = simOut.Ki_tuned
Ki_tuned =4×10.1277 0.1141 0.1082 0.1046
断点= simOut.breakpoints
断点=4×15 10 15 20
Gain-Scheduled控制器的性能改进
检查gain-scheduled控制器的性能,设置不同子系统测试模式和模拟模型。
(mdl set_param (,“/变体子系统”),“SimMode”,“测试”);simOut_GS = sim (mdl,“StopTime”,“2400”);
使用gain-scheduled控制器,一步反应水箱中的水位系统的植物要快得多,不如不调谐的控制器中使用过度watertank仿万博1manbetx真软件模型。
使用compareControllers_watertank脚本计算PID控制器的阶跃响应特性调整
= 10和gain-scheduled控制器。脚本生成两个表,其中包含上升时间(以秒为单位)和百分比超过gain-scheduled控制器和一套控制器增益。
compareControllers_watertank
上升时间=2×4表H = 1到5 H = 5到10 H = 10到15 H = 15到20 __________ ___________ _______ _______单一PID Gain-Scheduled 4.5093 3.7818 3.7519 3.6826 4.6721 3.7818 3.715 3.7402
过度=2×4表H = 1到5 H = 5到10 H = 10到15 H = 15到20 __________ ___________ _______ _______单一PID Gain-Scheduled 1.5187 5.2553 5.5341 6.2236 0.69606 5.2553 5.888 5.6592
一组相比收益调在一个营业点,gain-scheduled控制器:
导致一个更大的超调,上升时间快一步 = 1到5。
达到类似的步骤的性能 = 5到10因为涨幅调谐的一组 = 10。
导致较小的过冲和缓慢上升的时间步骤 = 10到15 = 15到20。
这个工作流是有用的,当你希望优化gain-scheduled控制器使用闭环PID自动调谐块。
关闭模式。
close_system (mdl 0);
另请参阅
闭环PID自动调谐|PID控制器|信号编辑器|动态查找表|变体子系统,变体模型