LSM6DSO
连接到LSM6DSO传感器Arduino硬件I2C总线
描述
的LSM6DSO对象读取加速度,角速度,和温度使用LSM6DSO传感器连接到硬件的I2C总线。LSM6DSO是一种惯性测量单元(IMU),用于读取所有三个维度的加速度和角速度。LSM6DSO也有一个嵌入式温度传感器。将LSM6DSO传感器连接到硬件上的I2C引脚上。您可以在MATLAB中从传感器读取数据®使用对象的功能.
创建
描述
输入参数
属性
请注意
的属性SampleRate,SamplesPerRead,ReadMode,输出格式,TimeFormat,Samplesavailable., 和SamplesRead仅适用于传感器融合和跟踪工具箱™和导航工具箱™。可以在创建传感器对象时设置这些属性。
除了TimeFormat,所有其他属性都是不可调的,这意味着一旦对象被锁定,您就不能更改它们的值。对象在调用读功能,和释放功能解锁它们。如果可调谐属性,则可以随时更改其值。
SampleRate- - - - - -读取样本的速率
100.(默认)|范围为[12.5,200]的正整数
从传感器读取数据的样本中的速率。
数据类型:双倍的
SamplesPerRead- - - - - -在单个执行读取功能中读取的样本数
10(默认)|[1 500]
在单个执行中从传感器读取的示例数读函数。
数据类型:双倍的
ReadMode- - - - - -指定要返回的数据样本
'最新的'(默认)|'最老的'
指定是否返回最新或最旧的数据示例。样品的数量取决于SamplesPerRead价值。从传感器读取的数据存储在MATLAB缓冲区中。
最新的- - - - - -提供缓冲区中可用的最新数据示例。缓冲区中的所有先前的数据样本都被丢弃。例如,如果
SamplesPerRead= 3,返回传感器读取的最新三个数据样本。下图说明了假设S1是如何返回的最新数据样本是存储在缓冲区中的第一传感器数据,S2是第二数据,依此类推,SN是存储在缓冲区中的最后一个数据
SamplesPerRead在传感器对象创建期间,属性设置为3。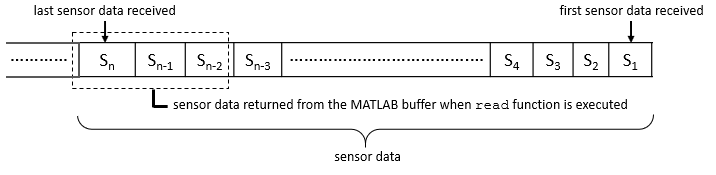
最古老的- - - - - -提供缓冲区中可用的最早的数据样本。在这种情况下,不会丢弃任何数据样本。例如,如果
SamplesPerRead= 3,读取第一个读取的前三个数据样本,将接下来的三个数据样本返回第二读,等等。下图说明了假设S1是存储在缓冲器中的第一传感器数据的最大返回的最陈述,S2是第二数据,依此类推,SN是存储在缓冲区中的最后一个数据
SamplesPerRead在传感器对象创建期间,属性设置为3。


数据类型:特征向量|字符串
SamplesRead- - - - - -样品阅读
双倍的
此属性是只读的。
SamplesRead.属性输出到目前为止读取的样本值读函数。SamplesRead.设置为0时,创建对象或当您释放物体。
数据类型:双倍的
Samplesavailable.- - - - - -主机缓冲区中的样本
双倍的
此属性是只读的。
主机缓冲中可用的样本。从传感器读取的数据存储在MATLAB缓冲区中。Samplesavailable.属性显示的数量Samplesavailable.在此主机缓冲区中。释放对象时,Samplesavailable.设置为0.当ReadMode传感器的设置为最新的,Samplesavailable.总是0。
数据类型:双倍的
输出格式- - - - - -设置输出格式
'时间表'(默认)|'矩阵'
设置执行的数据的输出格式读函数。
当。。。的时候输出格式设定为时间表,返回的数据具有以下字段:
时间-时间戳
约会时间或者持续时间格式加速 - 以m / s为单位的n-by-3阵列2
AngularVelocity - 以RAD / S为单位的N×3阵列
温度-以摄氏度为单位的n × 1数组
当。。。的时候输出格式设定为矩阵,数据被返回为加速度,角速度和时间戳的矩阵。传感器读数的单位与时间表格式。
N是指定的每次读取的样本数SamplesPerRead.每个场的三列表示x、y和z轴的测量值。
数据类型:特征向量|字符串
TimeFormat- - - - - -设置时间格式
“datetime”(默认)|“持续时间”
设置读取传感器数据时显示的时间格式。
约会时间—显示读取数据的日期和时间。持续时间—显示锁定传感器对象后经过的时间(以秒为单位)。控件第一次调用时锁定传感器对象读对象创建后或执行释放函数。
数据类型:特征向量|字符串
对象的功能
readacceleration. |
从传感器读取一个加速度样本 |
ReadAgrularVelocity. |
从传感器读取一个角速度的一个样本 |
readTemperature |
从传感器读取一个温度样本 |
读 |
以指定的速率读取实时传感器数据传感器融合和跟踪工具箱或者导航的工具箱 |
释放 |
释放传感器对象 |
冲洗 |
刷新主机缓冲区 |
信息 |
读取传感器相关信息 |
例子
创建连接到LSM6DSO传感器
创建一个arduino.与I2C库的对象。
a = arduino('com4',“Uno”,'图书馆','i2c');
创建传感器对象。
imu = lsm6dso(a)
I2CAddress: 106 ("0x6B") SCLPin: "A5" SDAPin: "A4"
创建LSM6DSO传感器连接(与传感器融合和跟踪工具箱或者导航的工具箱)
仅使用传感器融合和跟踪工具箱或导航工具箱创建具有可用属性的传感器对象。
清除IMU.;imu = lsm6dso(a,“SampleRate”, 110,“SamplesPerRead”,3,'readmode',“最新”)
IMU = LSM6DSO具有属性:I2CADDRESS:107(“0x6B”)总线:0 SCLPIN:“A5”Sdapin:“A4”Samplere:110(Samples / S)样本read:3 ReadMode:“最新”SamplesRead:0 SamplesAvailable:0 SamplesaMailable:0所有属性所有功能
更多关于
您还可以从以下列表中选择一个网站:
