主要内容
建模
为硬件连接准备模型,添加块以支持PX4自动驾驶仪万博1manbetx
块
| PX4 uORB读 | 读取指定uORB主题的uORB数据 |
| PX4 uORB写 | 为指定的uORB主题写入uORB数据 |
| PX4 uORB消息 | 使用指定的uORB主题创建空白消息 |
| PX4模拟输入 | 测量应用于ADC通道的模拟电压 |
| PX4 PWM输出 | 配置伺服电机和ESC控制的PWM输出 |
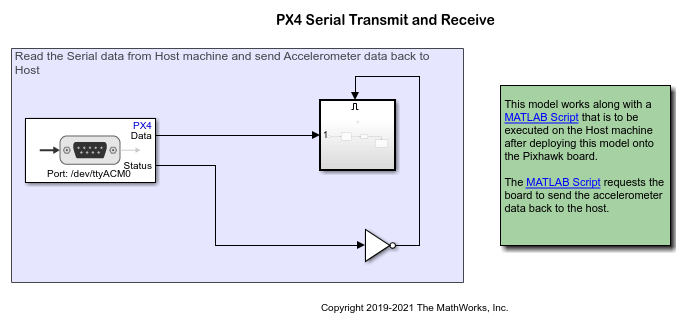
| 串行接收 | 从PX4飞行控制器的UART或USART端口读取数据 |
| 串行传输 | 将串行数据发送到UART或USART端口 |
| 汽车的态度 | 读取车辆测程uORB主题,获得姿态测量值 |
| 加速度计 | 读取sensor_accel uORB主题,获得三维线性加速度 |
| 陀螺仪 | 读取sensor_gyro uORB主题,获得三维旋转速率 |
| 磁强计 | 读取sensor_mag uORB主题,获得三维磁场 |
| 无线电控制发射机 | 读取input_rc uORB主题从无线电控制发射机获取数据 |
| 读取参数 | 读取PX4系统参数 |
| 电池 | 阅读battery_status uORB主题,获取关于电池状态的详细信息 |
| I2C大师写 | 将数据写入I2C从设备或I2C从设备寄存器 |
| I2C主读 | 从I2C从设备或I2C从设备寄存器读取数据 |
| 全球定位系统(GPS) | 读取vehicle_gps_position uORB主题,获取GPS坐标 |
功能
getMATFilesFromPixhawk |
从插入到Pixhawk硬件板上的SD卡中检索mat文件 |
px4MATFilestitcher |
将从SD卡检索到的多个mat文件合并为一个mat文件 |
主题
特色的例子














你也可以从以下列表中选择一个网站: